電機(jī)轉(zhuǎn)動的代碼
uchar phasecw[8] ={0x08,0x0c,0x04,0x06,0x02,0x03,0x01,0x09};//正轉(zhuǎn) 電機(jī)導(dǎo)通相序 D-C-B-A
uchar phaseccw[8]={0x01,0x03,0x02,0x06,0x04,0x0c,0x08,0x09};//反轉(zhuǎn) 電機(jī)導(dǎo)通相序 A-B-C-D
//順時針轉(zhuǎn)動
- void MotorCW(void)
- {
- uchar i;
- for(i=0;i<8;i++)
- {
- MotorData=phasecw[i];
- Delay_ms(speed);//轉(zhuǎn)速調(diào)節(jié)
- }
- i=0;
- }
- //逆時針轉(zhuǎn)動
- void MotorCCW(void)
- {
- uchar i;
- for(i=0;i<8;i++)
- {
- MotorData=phaseccw[i];
- Delay_ms(speed);//轉(zhuǎn)速調(diào)節(jié)
- }
- }
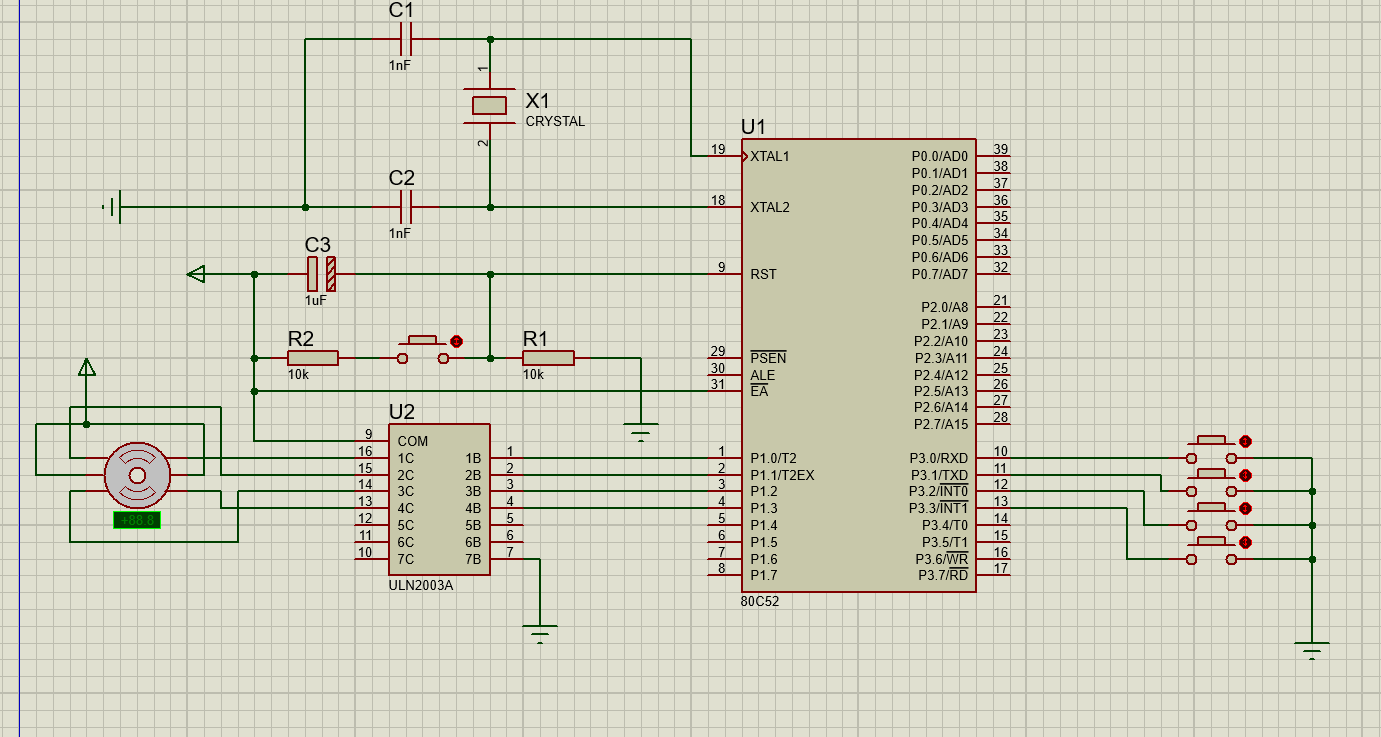
根據(jù)步進(jìn)電機(jī)的原理:依次給4相高電平就可以驅(qū)動步進(jìn)電機(jī)轉(zhuǎn)動而A,B,C,D四相 分別對應(yīng)P1.0,P1.1,P1.2,P1.3口所以只有讓P1口依次為0x01,0x02,0x04,0x08就行了����,如果要反轉(zhuǎn)就把它倒過來依次為0x08,0x04,0x02,0x01.一圈4步,所以叫四相四拍�����。但是我不推薦使用這種,它的一步角度較大電機(jī)會有較大抖動���。所以采用了四相八拍0x01,0x03,0x02,0x06,0x04,0x0c,0x08,0x09這樣電機(jī)轉(zhuǎn)動也相對平穩(wěn)不易出事�����。
為了實現(xiàn)電機(jī)的不停頓轉(zhuǎn)動我將轉(zhuǎn)動函數(shù)放在了死循環(huán)里���,但是在死循環(huán)里我們無法控制電機(jī)了怎么辦了就在死循環(huán)里加入一  步進(jìn)電機(jī)實驗.zip (20.67 KB, 下載次數(shù): 213) 個按鍵函數(shù)這樣死循環(huán)不停掃描按鍵我們就可以在k1 里面通過sem控制電機(jī)的正反轉(zhuǎn)了。
步進(jìn)電機(jī)實驗.zip (20.67 KB, 下載次數(shù): 213) 個按鍵函數(shù)這樣死循環(huán)不停掃描按鍵我們就可以在k1 里面通過sem控制電機(jī)的正反轉(zhuǎn)了。
死循環(huán):while(sem&&sam)
{
MotorCW();
Delay_ms(speed);//轉(zhuǎn)速調(diào)節(jié)
keypros();
}
while(!sem&&sam)
{
MotorCCW();
Delay_ms(speed);//轉(zhuǎn)速調(diào)節(jié)
按鍵控制:
if(k1==0) //檢測按鍵K1是否按下
{
Delay_ms(10); //消除抖動 一般大約10ms
if(k1==0) //再次判斷按鍵是否按下
{
sam=1;
sem=!sem;
}
while(!k1); //檢測按鍵是否松開
}
為什么要用一個鍵控制正反轉(zhuǎn)了��?不僅僅是因為按鍵不夠�����,更重要的是能消除鍵位沖突�����,鍵位沖突是指同時按下不同的鍵產(chǎn)生的沖突�。消除鍵位沖突也是每次實驗應(yīng)該考慮的事情。但是這樣也產(chǎn)生了新的問題就是當(dāng)我們用兩個鍵控制正反轉(zhuǎn)時����,單片機(jī)上電后電機(jī)不會轉(zhuǎn)動���。而用上述方法的話上電電機(jī)就進(jìn)入死循環(huán)開始轉(zhuǎn)動,所以引入sam控制電機(jī)的開始于停止�。當(dāng)sam為0與上sem可以使sem失去控制能力,也就是電機(jī)不轉(zhuǎn)了�����。這樣也就解決此問題還能控制電機(jī)停止
if(k2==0) //檢測按鍵K1是否按下
{
Delay_ms(10); //消除抖動 一般大約10ms
if(k2==0) //再次判斷按鍵是否按下
{
sam=0;
}
while(!k2); //檢測按鍵是否松開
}
我們由步進(jìn)電機(jī)原理可知電機(jī)是一步一步的走的����,如果我們控制了它每一步的間隔時間就可以達(dá)到控制電機(jī)的速度的目的��。但是對于我買的步進(jìn)電機(jī)來說速度變換的一定程度就不明顯了所以我設(shè)置了限位這樣就減少代碼的bug���,所以寫出按鍵控制速度代碼如下
if(k3==0) //檢測按鍵K1是否按下
{
Delay_ms(10); //消除抖動 一般大約10ms
if(k3==0) //再次判斷按鍵是否按下
{
speed++;
if(speed>6)
{
speed=6;
}
}
while(!k3); //檢測按鍵是否松開
}
if(k4==0) //檢測按鍵K1是否按下
{
Delay_ms(10); //消除抖動 一般大約10ms
if(k4==0) //再次判斷按鍵是否按下
{
speed--;
if(speed<1)
{
speed=1;
}
}
while(!k3); //檢測按鍵是否松開
}
}
理解了這些代碼的原理就可以寫出總代碼了
- #include<reg52.h>
- #define uchar unsigned char
- #define uint unsigned int
- #define MotorData P1 //步進(jìn)電機(jī)控制接口定義
- uchar phasecw[8] ={0x08,0x0c,0x04,0x06,0x02,0x03,0x01,0x09};//正轉(zhuǎn) 電機(jī)導(dǎo)通相序 D-C-B-A
- uchar phaseccw[8]={0x01,0x03,0x02,0x06,0x04,0x0c,0x08,0x09};//反轉(zhuǎn) 電機(jī)導(dǎo)通相序 A-B-C-D
- uint sem=0,sam=0,speed=3;//信號量���,sem控制正反轉(zhuǎn),sam設(shè)置電機(jī)是否轉(zhuǎn)動���,1轉(zhuǎn)動����,0不轉(zhuǎn)動
- sbit k1=P3^1;
- sbit k2=P3^0;
- sbit k3=P3^2;
- sbit k4=P3^3;
- //ms延時函數(shù)
- void Delay_ms(uint x)
- {
- uint i,j;
- for(i=0;i<x;i++)
- for(j=0;j<112;j++);
- }
- //順時針轉(zhuǎn)動
- void MotorCW(void)
- {
- uchar i;
- for(i=0;i<8;i++)
- {
- MotorData=phasecw[i];
- Delay_ms(speed);//轉(zhuǎn)速調(diào)節(jié)
- }
- i=0;
- }
- //逆時針轉(zhuǎn)動
- void MotorCCW(void)
- {
- uchar i;
- for(i=0;i<8;i++)
- {
- MotorData=phaseccw[i];
- Delay_ms(speed);//轉(zhuǎn)速調(diào)節(jié)
- }
- }
- //按鍵函數(shù)
- void keypros()
- {
- if(k1==0) //檢測按鍵K1是否按下
- {
- Delay_ms(10); //消除抖動 一般大約10ms
- if(k1==0) //再次判斷按鍵是否按下
- {
- sam=1;
- sem=!sem;
- }
- while(!k1); //檢測按鍵是否松開
- }
- if(k2==0) //檢測按鍵K1是否按下
- {
- Delay_ms(10); //消除抖動 一般大約10ms
- if(k2==0) //再次判斷按鍵是否按下
- {
- sam=0;
- }
- while(!k2); //檢測按鍵是否松開
- }
- if(k3==0) //檢測按鍵K1是否按下
- {
- Delay_ms(10); //消除抖動 一般大約10ms
- if(k3==0) //再次判斷按鍵是否按下
- {
- speed++;
- if(speed>6)
- {
- speed=6;
- }
-
- }
- while(!k3); //檢測按鍵是否松開
- }
- if(k4==0) //檢測按鍵K1是否按下
- {
- Delay_ms(10); //消除抖動 一般大約10ms
- if(k4==0) //再次判斷按鍵是否按下
- {
- speed--;
- if(speed<1)
- {
- speed=1;
- }
-
- }
- while(!k3); //檢測按鍵是否松開
- }
- }
- //主函數(shù)
- void main(void)
- {
- while(1)
- {
- MotorData=0x00; //設(shè)初值
- keypros();
- while(sem&&sam)
- {
- MotorCW();
- Delay_ms(speed);//轉(zhuǎn)速調(diào)節(jié)
- keypros();
- }
- while(!sem&&sam)
- {
- MotorCCW();
- Delay_ms(speed);//轉(zhuǎn)速調(diào)節(jié)
- keypros();
- }
- }
- }







