��(bi��o)�}: �p��C(j��)������·���B(t��i)�f(shu��)�� [��ӡ���(y��)]
����: augestclown �r(sh��)�g: 2018-7-16 17:53
��(bi��o)�}: �p��C(j��)������·���B(t��i)�f(shu��)��

0.png (40.07 KB, ���d��(sh��): 132)
���d����
2018-7-17 01:47 �ς�
�C(j��)������·���B(t��i)�f(shu��)��
3.1 ���ΙC(j��)�����P(gu��n)�I���B(t��i)�_�J(r��n) ;�������ƣ��C(j��)������ԭ��վ����B(t��i)�������ƣ�ʹ�C(j��)���˵����������_���ϣ����_����֧��ȫ�����������_�x�ء���(sh��)�F(xi��n)������ͨ�^(gu��)�{(di��o)��(ji��)�p�_��������C(j��)1�����C(j��)2ʹ�C(j��)�����_(d��)�����D��ʾλ��������ԭ�����������׃��ƽ����߅�ε��^(gu��)��������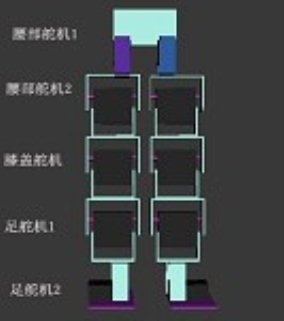
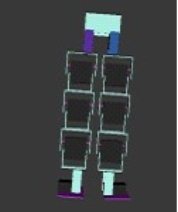

�����_�_������������������_����r�£����_��ǰ���������(sh��)�F(xi��n)�����{(di��o)��(ji��)Ҫ����C(j��)2�����C(j��)1.���ڌ�(du��)���B(t��i)ƽ���ԵĿ��]ע�����_�_���c�����ƽ���������@�����Dz��B(t��i)��������(l��i)����(ji��n)��;
���_���أ�ͬ�����_������C(j��)2�c��C(j��)1���{(di��o)��(ji��)ʹ�C(j��)�����_(d��)�����D��ʾλ�ã�ʹ�C(j��)�������_������������(sh��)�F(xi��n)��һ���Ŀ������������L(zh��ng)����Խ��Խ������������L(zh��ng)̫���������ǰ�M(j��n)�^(gu��)���������Ƅ�(d��ng)̫�h(yu��n)��ɲ���(w��n)�����Ҳ����̫С���](m��i)��Ч��������������{(di��o)ԇ�^(gu��)���еõ�����Ѳ��L(zh��ng)�����֮һ���_6CM�������
���D15����������ƫ��ͨ�^(gu��)������C(j��)1���C(j��)2 ���{(di��o)ԇʹ�C(j��)����������ƫ�����C(j��)�����������ڙC(j��)�������_������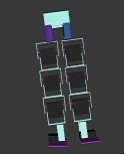
�ݿ�����_������һ�D�Ļ��A(ch��)���{(di��o)��(ji��)���_��������C(j��)2���C(j��)1ʹ�C(j��)�������_�����
���D17��&���_���أ�ԭ��ͬ���_��������
�����������_�ջأ�ͨ�^(gu��)�_����C(j��)1���C(j��)2��(sh��)�F(xi��n)���ĵ����������Ȼ���ջ����_������ʹ���c�D13λ��һ����������@�Ӿ͌�(sh��)�F(xi��n)���B�m(x��)ǰ�M(j��n)�������������ÿһ�����������_(k��i)ʼ�����Y(ji��)�������ʹ�C(j��)���˵����߸��M�˸���Ȼ����@���䌍(sh��)ֻҪ�������������@��(g��)��(d��ng)�����ѽ�(j��ng)����ˣ�ֻҪѭ�h(hu��n)�@��(g��)��(d��ng)���M������ѭ�h(hu��n)����(d��ng)���D13��λ�Ì�(sh��)�F(xi��n)�������p���ѭ�h(hu��n)ǰ�M(j��n)�@һ�^(gu��)�̡� �@��Ҫ�f(shu��)����ʲô��(d��ng)���MҪ������ƫ���_(k��i)ʼ��������?y��n)�C(j��)����ԭ����վ���ģ�������ƫ���_(k��i)ʼ�����ܸ���Ȼ���_(k��i)ʼ�����@����ȫ���˵����߷�ʽ�����
�f(shu��)����
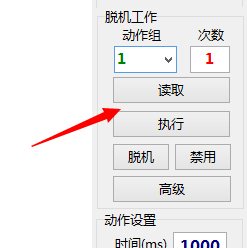
���b�(q��)��(d��ng)- ���_(k��i)��Xܛ�����(li��n)�C(j��)
- ������O(sh��)�á�
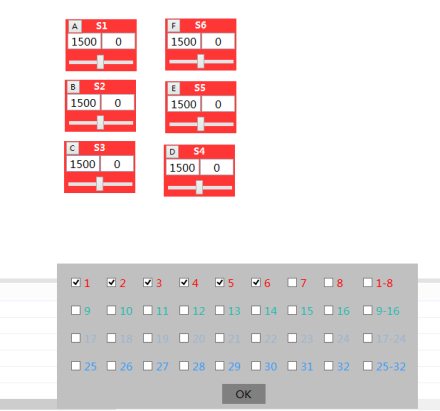
ȥ����Ҫ�Ķ�C(j��)���������������Ƅ�(d��ng)���������ʹ���Π����к͙C(j��)�������ơ�
- �{(di��o)���C(j��)���˵ij�ʼ��B(t��i)�������
�τ�(d��ng)ÿ��(g��)��C(j��)���Ļ��l�������ʹ�ÙC(j��)����̎��վ�����ˑB(t��i)���(�p�_��ֱ�ģ��](m��i)�Џ�����������_����ȫ���|����)
�{(di��o)����C(j��)���˵Ġ�B(t��i)֮�������ԓ��B(t��i)�O(sh��)�Þ��ʼλ��
��ÿһ��(g��)�C(j��)���˵ij�ʼ��B(t��i)�Dz�һ�ӵģ�������Ҫ�{(di��o)��һ�£�
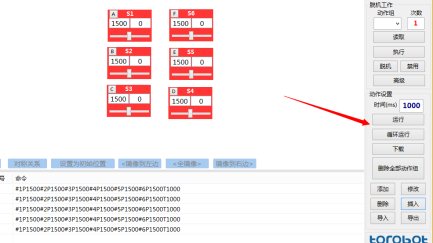
��(d��o)��֮������c(di��n)���҂�(c��)�ġ��\(y��n)�С������\(y��n)��һ��
�c(di��n)����ѭ�h(hu��n)�\(y��n)�С��������ѭ�h(hu��n)�\(y��n)��������ֱ���c(di��n)����ֹͣ���ŕ�(hu��)ֹͣ�������
�ڵ��������������ھ��{(di��o)ԇ��(d��ng)�����y(c��)ԇ��(d��ng)����ȫ���_֮�������������d��(d��ng)���M����C(j��)���ư����ˡ�
�c(di��n)���҂�(c��)�ġ����d�������_(k��i)ʼ���d��(d��ng)���M���
���d���˕�(hu��)��ʾ���d�ɹ���������ʾһ��(g��)��̖(h��o)�� NO.1�������˼�����f(shu��)�������d���DŽ�(d��ng)���M��̖(h��o)��1������
���d���֮��������(zh��)��ָ���Ą�(d��ng)���M����
�����c(di��n)�����xȡ��������Ȼ���x����Ҫ��(zh��)�еĄ�(d��ng)���M��̖(h��o)��Ȼ��ݔ���(zh��)�дΔ�(sh��)�������Ȼ���c(di��n)����(zh��)�С�������͕�(hu��)��(zh��)�����O(sh��)�õĄ�(d��ng)���M������
Ó�C(j��)����˼��Ó�x��X����(zh��)�Є�(d��ng)���M
�O(sh��)�÷������£�
�����c(di��n)�����xȡ�������Ȼ���x����Ҫ��(zh��)�еĄ�(d��ng)���M��̖(h��o)��Ȼ��ݔ���(zh��)�дΔ�(sh��)������Ȼ���c(di��n)��Ó�C(j��)�����͕�(hu��)�����x��Ą�(d��ng)���M�O(sh��)�Þ�Ó�C(j��)�Ԅ�(d��ng)��(zh��)�У������f(shu��)��C(j��)���ư���늵ĕr(sh��)���Ԅ�(d��ng)��(zh��)�У�
ע�⣺��(zh��)�дΔ�(sh��)����̫�L(zh��ng)�����t��(hu��)Ӱ���Xܛ��(li��n)�C(j��)����?y��n)�Ó�C(j��)��(zh��)�е��^(gu��)�������������X�ǟo(w��)��(li��n)�C(j��)ʹ�õ��������Ҫ�Ȉ�(zh��)���ꮅ�ſ���(li��n)�C(j��)
ȫ���Y��51hei���d��ַ��
 �p��C(j��)���� ����.zip
(170.4 KB, ���d��(sh��): 109)
�p��C(j��)���� ����.zip
(170.4 KB, ���d��(sh��): 109)
2018-7-16 17:52 �ς�
�c(di��n)���ļ������d����
����
���d�e��: �ڎ� -5
 ���ֳ���.rar
(2.25 KB, ���d��(sh��): 59)
���ֳ���.rar
(2.25 KB, ���d��(sh��): 59)
2018-7-17 01:51 �ς�
�c(di��n)���ļ������d����
���d�e��: �ڎ� -5
����: �o(w��)��1417 �r(sh��)�g: 2018-9-9 12:29
Ո(q��ng)��(w��n)�@��(g��)ܛ����ʲô���ְ�����������
����: �옷(l��)�ۜI �r(sh��)�g: 2018-10-5 19:51
ʲô�r(sh��)����܌W(xu��)��������ˮƽ�����
����: rockshadowa �r(sh��)�g: 2018-10-22 23:05
߀��ͨ�^(gu��)��λ�C(j��)�{(di��o)����(sh��)������B(t��i)ƽ��Ć�(w��n)�}߀�Ǜ](m��i)�н�Q��߀���_(k��i)�h(hu��n)��ϵ�y(t��ng)
����: ye3ye3ye3 �r(sh��)�g: 2018-12-5 11:56
���x����
����: ziw �r(sh��)�g: 2019-2-27 09:21
����������@��(g��)ָ���е���ؓ(f��)��(sh��)��ʲô��˼������������
����: 18943319219 �r(sh��)�g: 2019-3-31 16:54
����������Ո(q��ng)��(w��n)���@��(g��)�C(j��)���˵ĽY(ji��)��(g��u)���Ը��Vһ��
����: hzmdqllf �r(sh��)�g: 2019-9-13 16:42
���ͼ��ͣ��������������������
����: iwfcy51hei �r(sh��)�g: 2019-10-9 13:20
��C(j��)һֱ����ô�k��
����: beisheng �r(sh��)�g: 2019-11-21 16:50
���ͼ���������֧��
����: jambillking �r(sh��)�g: 2019-12-4 14:38
��arduino��������������
����: jambillking �r(sh��)�g: 2019-12-4 14:39
��λ�C(j��)�ģ����п�����C(j��)ô�����������������������ʲô��̖(h��o)������������
����: pengpai �r(sh��)�g: 2019-12-11 16:34
���x����
����: 3233635736 �r(sh��)�g: 2020-9-23 21:45
��ɶ���涼�ǁy�aѽ
����: ��die �r(sh��)�g: 2023-5-20 23:49
�@��ʲôܛ��
����: haide1998 �r(sh��)�g: 2024-5-5 09:03
·�^(gu��)�W(xu��)��(x��)��������x�x����������
| �gӭ���R (http://www.torrancerestoration.com/bbs/) |
Powered by Discuz! X3.1 |