ժҪSTC89C52��STCϵ�І�Ƭ�C(j��)�(y��ng)�ñ��^�V����һ����Ԅ�(d��ng)�����I(l��ng)�������кܸߵăr(ji��)ֵ������������ԺͶ�����ܵ��ˏV������O(sh��)Ӌ(j��)��(��i)���ߵĺ��u(p��ng)�������O(sh��)Ӌ(j��)��Ҫ������STC89C52��Ƭ�C(j��)��������������ɜy(c��)����(b��o)��ϵ�y(t��ng)�������������STC89C52������оƬ�������ó�����(du��)���x�ęz�y(c��)���������ǰ�����w�ľ��x̽�y(c��)����(l��i)��Ȼ���Ƭ�C(j��)̎���\(y��n)��������c�O(sh��)���Ĉ�(b��o)�����xֵ�M(j��n)�б��^�Д��������(d��ng)�y(c��)�þ��xС���O(sh��)��ֵ�r(sh��)��STC89C52�l(f��)��ָ����Ʒ��Q����(b��o)���������
1 �wՓ
1.1 �(xi��ng)Ŀ�о����������x
���ڳ��y(c��)����һ�N�ǽ��|�z�y(c��)���g(sh��)��������ܹ⾀�����y(c��)��(du��)���ɫ�ȵ�Ӱ��������^�����x�����l(w��i)����������ͳ���������ۉm���ߜ����������g���w�Ȑ��ӭh(hu��n)������������پS�o(h��)������Ⱦ�������߿ɿ����L(zh��ng)���������c(di��n)�����˿ɏV����(y��ng)���ڼ��I(y��)�������V�I(y��)��늏S����������I(y��)�����ˮ̎��S�������ˮ̎��S������r(n��ng)�I(y��)��ˮ�������h(hu��n)���z�y(c��)������ʳƷ���ƘI(y��)�������ϘI(y��)��������ӄ���ʳ������������Ʒ����������Ѵ�������ˮ�������������������g��λ������·�ߵ��ИI(y��)��������������ڲ�ͬ�h(hu��n)�����M(j��n)�о��x��(zh��n)�_���ھ���(bi��o)��������ֱ������ˮ����ơ��������ϵ�Һλ���ƣ����M(j��n)�в�ֵ�O(sh��)������ֱ���@ʾ���NҺλ��Һλ������λ�߶������ˣ����ڿ՚��Мy(c��)��������h(hu��n)�������^�V���đ�(y��ng)������������ó����z�y(c��)�������^Ѹ�١��������Ӌ(j��)�㺆(ji��n)�Ρ����ڌ�(sh��)�F(xi��n)��(sh��)�r(sh��)���������������ڜy(c��)�����ȷ������_(d��)�����I(y��)��(sh��)�õ�ָ��(bi��o)Ҫ��������˞���ʹ�Ƅ�(d��ng)�C(j��)�����܉��Ԅ�(d��ng)����ϵK��������������ͱ���b��y(c��)��ϵ�y(t��ng)����ʹ�估�r(sh��)�@ȡ���ϵK���λ����Ϣ�����x�ͷ�����˳����y(c��)�����Ƅ�(d��ng)�C(j��)���˵��о��ϵõ��ˏV���đ�(y��ng)��������ͬ�r(sh��)���ڳ����y(c��)��ϵ�y(t��ng)�������ϵ��@Щ��(y��u)�c(di��n)���������܇��܇?y��n)��_(d��)�����Ʒ���Ҳ�õ��ˏV���đ�(y��ng)�����
2 ���w�O(sh��)Ӌ(j��)������Փ�C
2.1 ���w�����O(sh��)Ӌ(j��) ���O(sh��)Ӌ(j��)����Ӳ����ܛ���O(sh��)Ӌ(j��)�ɂ�(g��)���֡�ģ�K���֞锵(sh��)��(j��)�ɼ����������I���ơ���λ��(sh��)�a���@ʾ���������(b��o)������ģ�K���·�Y(ji��)��(g��u)�Ʉ��֞飺����������������Q������Ƭ�C(j��)�����·��������ʹ��O(sh��)Ӌ(j��)�ĺ���ģ�K��(l��i)�f(shu��)���������Ƭ�C(j��)�����O(sh��)Ӌ(j��)�����Ć�Ԫ�������Դ�ϵ�y(t��ng)Ҳ�dž�Ƭ�C(j��)��(y��ng)��ϵ�y(t��ng)��һ�N��(y��ng)�������Ƭ�C(j��)��(y��ng)��ϵ�y(t��ng)Ҳ����Ӳ����ܛ���M�ɡ�Ӳ��������Ƭ�C(j��)�������ݔ��/ݔ���O(sh��)���������Լ������(y��ng)���·�ȽM�ɵ�ϵ�y(t��ng)��ܛ���Ǹ��N��������Ŀ��Q�������Ƭ�C(j��)��(y��ng)��ϵ�y(t��ng)�������^(gu��)�̰������w�O(sh��)Ӌ(j��)������Ӳ���O(sh��)Ӌ(j��)��ܛ���O(sh��)Ӌ(j��)�Ȏׂ�(g��)�A���������ϵ�y(t��ng)����STC89C52��Ƭ�C(j��)������Ŀ��Ɔ�Ԫ,��(d��ng)�y(c��)�õľ��xС���O(sh��)�����x�r(sh��)���������оƬ���y(c��)�õĔ�(sh��)ֵ�c�O(sh��)��ֵ�M(j��n)�б��^̎��������Ȼ����Ʒ��Q����(b��o)���������ϵ�y(t��ng)���w���O(sh��)Ӌ(j��)����D��D1��ʾ�������
�D1 ϵ�y(t��ng)����D��Ҋ(ji��n)������
3 Ӳ����(sh��)�F(xi��n)����Ԫ�·�O(sh��)Ӌ(j��)
3.1 ������ģ�K
��������Сϵ�y(t��ng)�·��D2��ʾ����
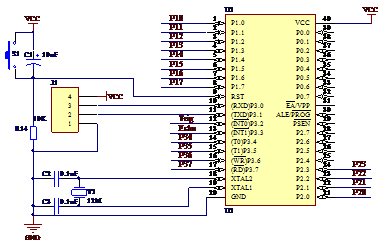
�D2 ��Сϵ�y(t��ng)
Ӳ���·���O(sh��)Ӌ(j��)Ҋ(ji��n)�D3����������ϵķ�����֪�ڱ��O(sh��)Ӌ(j��)��Ҫ�õ����������� STC89C52��������������������I���������λ��(sh��)�a���������Q����һЩ��Ƭ�C(j��)�����(y��ng)���·�����������D1���Դ����ָʾ��������·���õ�3��(g��)���I����һ��(g��)���O(sh��)���I, һ��(g��)���I�����һ��(g��)�p�I��
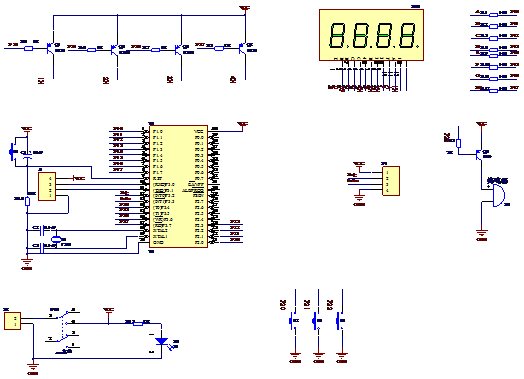
�D3 ���O(sh��)Ӌ(j��)�·�D
3.2 �Դ�O(sh��)Ӌ(j��)
�Դ���ֵ��O(sh��)Ӌ(j��)����3��(ji��)5̖(h��o)��늳�4.5V��������
3.3 �����y(c��)ԇģ�K ����ģ�K���ìF(xi��n)�ɵģȣã��ӣң�������ģ�K������ԓģ�K���ṩ 2cm-400cm �ķǽ��|ʽ���x�Мy(c��)���ܣ��y(c��)�ྫ�ȿ��_(d��)�ߵ� 3mm���ģ�K���������l(f��)�������������c�����·�����������������ԭ�������� IO �� TRIG �|�l(f��)�y(c��)��������o���� 10us �ĸ��ƽ��̖(h��o);ģ�K�Ԅ�(d��ng)�l(f��)�� 8 ��(g��) 40khz�ķ����������Ԅ�(d��ng)�z�y(c��)�Ƿ�����̖(h��o)�������������̖(h��o)���������ͨ�^(gu��) IO �� ECHO ݔ��һ��(g��)���ƽ�����ƽ���m(x��)�ĕr(sh��)�g���dz����İl(f��)�䵽���صĕr(sh��)�g��������y(c��)ԇ���x=(���ƽ�r(sh��)�g*��(340M/S))/2��������(sh��)�����D4������VCC ��5V �Դ������GND ��ؾ���TRIG �|�l(f��)������̖(h��o)ݔ�����ECHO �����̖(h��o)ݔ������֧����
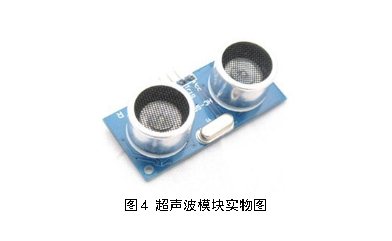
����̽�y(c��)ģ�KHC-SR04��ʹ�÷������£�IO���|�l(f��)�������oTrig������10us�ĸ��ƽ������(d��ng)�y(c��)��������ģ�K�Ԅ�(d��ng)�l(f��)��8��(g��)40Khz�ķ������Ԅ�(d��ng)�z�y(c��)�Ƿ�����̖(h��o)���������������̖(h��o)�����������ͨ�^(gu��)IO��Echoݔ��һ��(g��)���ƽ�����ƽ���m(x��)�ĕr(sh��)�g���dz����İl(f��)�䵽���صĕr(sh��)�g���y(c��)ԇ���x=�����ƽ�r(sh��)�g*340��/ 2������λ��m��������Мy(c��)ԇ������Ҫ�Ƀɂ�(g��)����(sh��)��ɡ�
��(sh��)�F(xi��n)�в��ö��r(sh��)��0�M(j��n)�ж��r(sh��)�y(c��)������8���l���TCNTT0�A(y��)�O(sh��)ֵ0XCE�������(d��ng)timer0����Д�l(f��)��2500�Εr(sh��)��125ms��Ӌ(j��)�㹫ʽ�飨��λ��ms����
T = �����r(sh��)��0�����(sh��) * ��0XFF - 0XCE����/ 1000
���ж��r(sh��)��0��ֵӋ(j��)������(j��)���l��ͬ���в���
3.3.1 ���������������c�������o�����P(gu��n)��һ�N��Ȼ�F(xi��n)��(d��ng)���l�ʸߵ����^(gu��)�˶� (t��ng)�X(ju��)���l�ʘO��(����(j��)������(sh��)�(y��n)��(sh��)��(j��)�y(t��ng)Ӌ(j��)�������ȡ����(sh��)��20000��Ɲ)�r(sh��)����˂��͕�(hu��)�X(ju��)�첻���܇��Ĵ����������Q�@�N���l�ʵ��顰�������˵� (t��ng)�X(ju��)������D5��ʾ����

�D5 �˵� (t��ng)�X(ju��)����
������������
��1����������
���ڳ����IJ��L(zh��ng)�������������侀���Ժ⾀һ���������܉���������������Ҳ�ܾ۽���������������؎ι�W(xu��)�ϵ����ж�������������侀��һ�N���|(zh��)���淴��r(sh��)������ǵ��ڷ������������(d��ng)�侀�^(gu��)һ�N���|(zh��)�M(j��n)����һ�N�ܶȲ�ͬ�����|(zh��)�r(sh��)�͕�(hu��)�a(ch��n)������F(xi��n)������Ҳ����Ҫ��׃���Ă�����������ɷN���|(zh��)���ܶȲ�e���t������Ҳ�����������
��2����������
���ڸ��N���|(zh��)�Ђ����r(sh��)���S���������x����������䏊(qi��ng)�ȕ�(hu��)��u�p�����@����?y��n)���|(zh��)Ҫ���յ����IJ��������������(du��)��ͬһ���|(zh��)������������l��Խ����������|(zh��)���վ�Խ��(qi��ng)����(du��)��һ��(g��)�l��һ�����������ښ��w�Ђ����r(sh��)�����Ȟ�v�����������Һ�w�Ђ����r(sh��)���վͱ��^����������ڹ��w�Ђ����r(sh��)��������С�ġ�
��3���������������f����
����֮�������ڸ���(g��)���I(y��)���T�еõ��V���đ�(y��ng)���������Ҫԭ��߀���ڱ������Џ�(qi��ng)��ö�Ĺ��������ʲô���@ô��(qi��ng)��Ĺ�����?��?y��n)�?d��ng)���M(j��n)��ijһ���|(zh��)�Еr(sh��)�������������������ʹ���|(zh��)�еķ���Ҳ�S֮���(d��ng)��������(d��ng)���l�ʺ����l�ʡ�����������������(d��ng)���l�ʛQ���˷������(d��ng)���ٶ�������l�������ٶ��������Y�����������(d��ng)���@�õ����������c���ӱ������|(zh��)�����P(gu��n)�������Ҫ���ɷ��ӵ����(d��ng)�ٶȵ�ƽ��?j��ng)Q����,������������l�����ߣ�Ҳ�������|(zh��)�������ܵõ����ߵ�������������������l�ʱ���ͨ��Ҫ�߳��ܶ���������������ʹ���|(zh��)���ӫ@�úܴ����������Q��Ԓ��(l��i)�f(shu��)�����������Ϳ��Թ��o���|(zh��)��������Ĺ������
��4��������������
��(d��ng)���M(j��n)��ij���w�r(sh��),���������(d��ng)ʹ���|(zh��)�����֮�g�a(ch��n)�����s��ϡ������ã���ʹ���|(zh��)���ܵĉ����a(ch��n)��׃��������������(d��ng)���Ӊ����F(xi��n)��������á�
3.3.2 �����Q������ɮa(ch��n)�������ͽ��ճ����@�N���ܵ��b�þ��dz������������������(x��)�T�ϷQ�鳬�Q��������������߳���̽�^�����������̽�^��Ҫ�ɉ�늾�Ƭ�M���������ȿ��l(f��)�䳬����Ҳ���Խ��ճ�������С���ʳ�̽�^������̽�y(c��)������������S�ͬ�ĽY(ji��)��(g��u)������ɷ�ֱ̽�^���v������б̽�^���M�����������沨̽�^�����沨������mķ��̽�^���mķ�������p̽�^��һ��(g��)̽�^����������һ��(g��)̽�^���գ��ȡ�
������̽�^�ĺ����������������߽��������е�һ�K��늾�Ƭ��������(g��u)�ɾ�Ƭ�IJ��Ͽ������S��N�����ھ�Ƭ�Ĵ�С������ֱ���ͺ��Ҳ������ͬ�������ÿ��(g��)̽�^�����ܶ��Dz�ͬ��������҂�ʹ��ǰ����A(y��)���˽����ԓ̽�^�����܅���(sh��)����
��������������Ҫ����ָ��(bi��o)������
��1�������l����������l�ʾ��lj�늾�Ƭ�Ĺ����l�������(d��ng)�ӵ����ɶ˵Ľ���늉����l�ʺ;�Ƭ�Ĺ����l����ȕr(sh��)����ݔ���������������`����Ҳ��������
������2�������ض���������ډ�늲��ϵľ����c(di��n)һ����^������e�r(sh��)�\���ó���̽�^ʹ�ù����^С�������Թ����ضȱ��^�����������L(zh��ng)�r(sh��)�g�ع�������ʧЧ������t(y��)���õij�̽�^�Ĝضȱ��^����������Ҫ�Ϊ�(d��)�������O(sh��)�������
����������3���`���ȡ���Ҫȡ�Q�����쾧Ƭ���������C(j��)����ϵ��(sh��)������`���ȸߡ�
����� (t��ng)�������l�ʷ����飺20Hz��20kHz������������ (t��ng)���������������l�ʷ�����������20Hz�����l�ʵ����Q����l���������20kHz�����l�ʵ����Q�鳬�����������ֱ��������ʽ���l��Խ������@������Խ��������������Խ��(qi��ng)����������������ó������@�N���ܾͿ��Ƴɳ������������������������������ڿ՚��еĂ����ٶ��^�����������340m��s������@��ʹ�ó���������ʹ��׃�÷dz���(ji��n)����������҂��x�É��ʽ�����������������̽�^���ò����lj�늾��w�͉���մ����������É�늲��ϵĉ��Ч��(y��ng)��(l��i)�M(j��n)�й������������扺�Ч��(y��ng)�����l����(d��ng)�D(zhu��n)�Q�ɸ��l�C(j��)е���(d��ng)���Ķ��a(ch��n)�������������������l(f��)��̽�^�������������Ч��(y��ng)������������(d��ng)���D(zhu��n)�Q�����̖(h��o)���������������̽�^������
�����о������ó������˂��ѽ�(j��ng)�O(sh��)Ӌ(j��)���Ƴ����S��N�����l(f��)���������������w���v�������l(f��)�������w���Է֞�ɴ��һ�����늚ⷽʽ�a(ch��n)����������һ����ÙC(j��)е��ʽ�a(ch��n)�����������늚ⷽʽ���������������������s�ͺ�늄�(d��ng)�͵ȣ��C(j��)е��ʽ�мӠ��y(t��ng)�������Һ�ں͚������ѵ�����������a(ch��n)���ij������l��������ʺ������Ը�����ͬ�������;Ҳ������ͬ����Ŀǰ�^�鳣�õ��lj��ʽ�����l(f��)�������
�D6 �����������Y(ji��)��(g��u)
���ʽ�����l(f��)������(sh��)�H�������É�늾��w���C���(l��i)�����ġ������l(f��)������(n��i)���Y(ji��)��(g��u)��D��ʾ���������Ѓɂ�(g��)��늾�Ƭ��һ��(g��)������������(d��ng)���ăɘO����}�_��̖(h��o)�������l�ʵ��ډ�늾�Ƭ�Ĺ�����ʎ�l�ʕr(sh��)��������늾�Ƭ����(hu��)�l(f��)���������������(d��ng)��������(d��ng)����a(ch��n)����������֮�����������늘O�gδ���늉�����(d��ng)�������յ������r(sh��)����������ȉ�늾�Ƭ�����(d��ng)��������C(j��)е���D(zhu��n)�Q�����̖(h��o)���@�r(sh��)���ͳɞ鳬�������������������D6��ʾ�������
3.4 ����������ԭ��
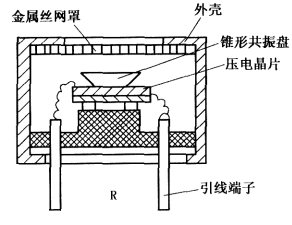
�����ϳ�Ҋ(ji��n)�ij��������������_(k��i)�����������(n��i)���Y(ji��)��(g��u)��D7��ʾ�������һ��(g��)��(f��)��ʽ���(d��ng)�����`��ع̶��ڵ��������ԓ��(f��)��ʽ���(d��ng)�������C�����Լ�һ��(g��)����Ƭ��һ��(g��)����մ�Ƭ�M�ɵ��p��늾�ƬԪ�����(d��ng)�����C�����������Σ�Ŀ��������Ч��ݗ���������(d��ng)���a(ch��n)���ij�����������ҿ�����Ч��ʹ�����ۼ������(d��ng)�������벿λ�����
��(d��ng)늉������ډ���մɕr(sh��)���͕�(hu��)�S늉����l�ʵ�׃���a(ch��n)���C(j��)е׃����������һ���棬��(d��ng)���(d��ng)����մɕr(sh��)�������t��(hu��)�a(ch��n)��һ��(g��)늺ɡ������@һԭ�����������(d��ng)�o�Ƀ�Ƭ����մɻ�һƬ����մɺ�һ��(g��)����Ƭ��(g��u)�ɵ����(d��ng)���������^���p��늾�ƬԪ���������ʩ��һ��(g��)���̖(h��o)�r(sh��)��������͕�(hu��)�������(d��ng)�l(f��)������������෴��������(d��ng)���p��늾�ƬԪ��ʩ�ӳ����(d��ng)�r(sh��)���͕�(hu��)�a(ch��n)��һ��(g��)���̖(h��o)������������������������Ԍ�����մ��������������������
�D7 ������(n��i)���Y(ji��)��(g��u)
������һ�N�ڏ��Խ��|(zh��)�еęC(j��)е��ʎ�����l�ʳ��^(gu��)20KHz�����֙M����ʎ�Ϳv����ʎ�ɷN�������������ښ��w���Һ�w�����w�Ђ�����������ٶȲ�ͬ��������������ͷ���F(xi��n)�����������ڂ����^(gu��)������˥�p����
�����Ļ�����������������
���Ă����ٶ������l�ʳ��Բ��L(zh��ng)��(l��i)��ʾ����늴Ų��Ă����ٶ���3��108m/s������������ڿ՚��еĂ����ٶȺ���������s��344m/s (20��r(sh��))���������@�N���^�͵Ă����ٶ����������L(zh��ng)�ܶ���������@����ζ�����ԫ@���^�ߵľ��x�ͷ���ֱ������������������@�N�^�ߵķֱ������ԣ���ʹ�҂��п������M(j��n)�Мy(c��)���r(sh��)�@�úܸߵľ��_��������
Ҫ̽�y(c��)ij��(g��)���w�Ƿ���ڣ��������܉���ԓ���w�ϵõ���������������ڽ�������ľ������������������������z�ͼ��ȿ��Է������100���ij������������҂����Ժ����ذl(f��)�F(xi��n)�@Щ���w����������ڲ�����������që�ȿ������ճ�����������˺��y���ó���̽�y(c��)����������ͬ�r(sh��)��������ڲ�Ҏ(gu��)�t���䣬ͨ������ܺ��y̽�y(c��)���������Լ�б�±�������w���@Щ���؛Q���˳���������y(c��)ԇ�h(hu��n)�����ڿՕ�Ĉ�(ch��ng)�����������Ҝy(c��)ԇ���w��횷��䳬����
���������ٶȡ�c�����������й�ʽ��ʾ������c=331.5+0.607t (m/s)��ʽ�У�t=�ض� (��)Ҳ�����f(shu��)�����������ٶ��S�܇��ضȵ�׃����������ͬ����������Ҫ���_�Ĝy(c��)���cij��(g��)���w֮�g�ľ��x�r(sh��)�������ʼ�K�z���܇��ض���ʮ�ֱ�Ҫ����������䶬���҃�(n��i)��ز��^����������(du��)�����y(c��)��ľ���Ӱ푺ܴ���������˕r(sh��)����18B20���ض��a(b��)����(l��i)�pС�ض�׃��������(l��i)�Ĝy(c��)���`�����������]�����O(sh��)Ӌ(j��)�Ĝy(c��)ԇ�h(hu��n)�������҃�(n��i)�����ҳ�����Ҫ�����ڜy(c��)��������(du��)�y(c��)������Ҫ�ߣ������P(gu��n)�ڜض�Ч��(y��ng)��(du��)ϵ�y(t��ng)��Ӱ푆�(w��n)�}���@�ﲻ�������̽ӑ���
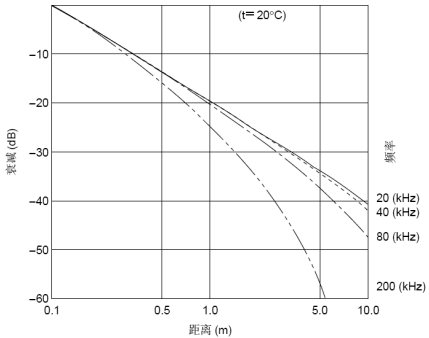
4. ˥�p
�������՚��еij�����(qi��ng)���S���x��׃���ɱ����p��������@����?y��n)�����F(xi��n)������(d��o)�µ������α����ϵĔU(ku��)ɢ�pʧ�������Ҳ����?y��n)���|(zh��)���������a(ch��n)�������Փpʧ������D8��ʾ�����������l��Խ�����˥�p�ʾ�Խ�ߣ������Ă������xҲ��Խ������ɴ˿�Ҋ(ji��n)������˥�p����ֱ��Ӱ��˳�����������Ч���x��
�D8 ���ڲ�ͬ���x�µ�˥�p����
5��������
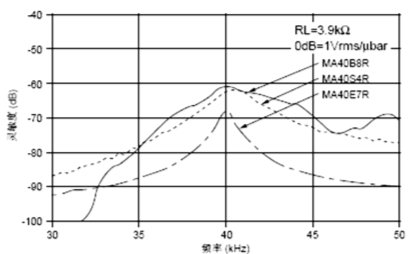
����(j��) (S.P.L.) �DZ�ʾ�����Ć�λ�������������й�ʽ���Ա�ʾ��
S.P.L.= 20logP/Pre (dB)ʽ��,��P������Ч�� (��bar)�������Pre���酢���� (2��10-4��bar)��D6��ʾ��N���ó��������������D����
�D9 ���������������D
6���`��������
�`�����DZ�ʾ�����ռ�(j��)�Ć�λ����ʹ�����й�ʽ���Ա�ʾ������
�`����= 20log E/P (dB)ʽ��,��E�������a(ch��n)����늉� (Vrms)���������P����ݔ����(��bar)���������������`����ֱ��Ӱ���ϵ�y(t��ng)�y(c��)�����������D7��ʾ��N�г�Ҋ(ji��n)�������������`���ȈD���ĈD�п��l(f��)�F(xi��n)40KHz�r(sh��)������������(j��)���������Ҳ�����f(shu��)40KHz�r(sh��)����(du��)��(y��ng)���`����������
�D10 �����������`����ʾ��D
7��ݗ������
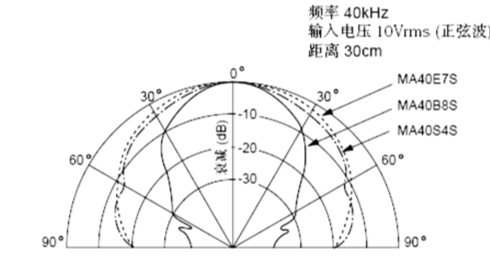
�ѳ������������b���_(t��i)���ϡ�Ȼ��������y(c��)���Ƕ��c�� (�`����) ֮�g���P(gu��n)ϵ�������˜�(zh��n)�_�ر��_(d��)ݗ���������cǰ������(du��)���������� (�`����) ��(j��)˥�p6dB�ĽǶȱ��Q���˥�p�Ƕȣ��æ�1/2��ʾ������������O(sh��)��������ߴ��^С���ګ@�þ��_��ݗ��Ƕȡ���D11��ʾ��N��Ҋ(ji��n)������������ݗ������ʾ��D����
�D11 ����������ݗ������ʾ��D
���������о��Y(ji��)�����y��������������������40KHz������(n��i)������������(j��)����ߵ��`��������
3.5 �y(c��)�����
�����l(f��)������ijһ����l(f��)�䳬������ڰl(f��)��r(sh��)�̵�ͬ�r(sh��)�_(k��i)ʼӋ(j��)�r(sh��)�������ڿ՚��Ђ������;�������ϵK�����������(l��i)�������������յ����䲨������ֹͣӋ(j��)�r(sh��)�����������ڿ՚��еĂ����ٶȞ�340m/s������(j��)Ӌ(j��)�r(sh��)��ӛ䛵ĕr(sh��)�gt�����Ϳ���Ӌ(j��)����l(f��)���c(di��n)���ϵK��ľ��x(s)��������s=340t/2
��õij��y(c��)��ķ����ǻ�̽�y(c��)������������l(f��)������ijһ����l(f��)�䳬����������ڰl(f��)��r(sh��)�̵�ͬ�r(sh��)Ӌ(j��)��(sh��)���_(k��i)ʼӋ(j��)�r(sh��)����������ڿ՚��Ђ������;�������ϵK������������������(l��i)����������������յ�����صij���������ֹͣӋ(j��)�r(sh��)������������ڿ՚��еĂ����ٶȞ�340m/s����������(j��)Ӌ(j��)�r(sh��)��ӛ䛵ĕr(sh��)�gt�����Ϳ���Ӌ(j��)����l(f��)���c(di��n)���ϵK����ľ��xs���������s=340t/2��
���ڳ���Ҳ��һ�N�����������V�c�ض����P(gu��n)�����ʹ�Õr(sh��)�����������������|(zh��)�ض�׃����������t�ɽ����J(r��n)�鳬���ٶ��ڂ������^(gu��)�����ǻ�����׃������������(du��)�y(c��)�ྫ��Ҫ��ܸߣ��t��(y��ng)ͨ�^(gu��)�ض��a(b��)��?sh��)ķ����?du��)�y(c��)���Y(ji��)�����Ԕ�(sh��)ֵУ��������ٴ_�������
ֻҪ�y(c��)�ó��������ĕr(sh��)�g���������þ��x���@���dz����y(c��)���x�Ļ���ԭ����������D12��ʾ����Ҋ(ji��n)������
�D12 �����Ĝy(c��)��ԭ��
 ��3-1��
��3-1��
 ��3-2��
��3-2��
ʽ��:L---��̽�^֮�g���ľ��x��һ��.
��֪�����������ľ��x��:

( 3-3)
ʽ��:v�������ڽ��|(zh��)�еĂ����ٶ�;
t�������İl(f��)�䵽��������Ҫ�ĕr(sh��)�g.
����3��2������3��3�����루3-1���еã�
( 3-4)
����,�����Ă����ٶ�v��һ���Ĝض�����һ��(g��)����(sh��)(�����ڜض�T=30�ȕr(sh��),V=349m/s);��(d��ng)��Ҫ�y(c��)���ľ��xH�h(yu��n)�h(yu��n)����L�r(sh��),�t(3��4)׃?y��u)?

( 3-5)
����,ֻҪ��Ҫ�y(c��)�������������ĕr(sh��)�gt,�Ϳ��Եó��y(c��)���ľ��xH.
3.6 �r(sh��)��·���O(sh��)Ӌ(j��)
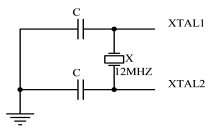
XTAL1��XTAL2�քe�鷴��Ŵ�����ݔ���ݔ�����ԓ����Ŵ����������Þ�Ƭ��(n��i)��ʎ����ʯ����ʎ���մ���ʎ���ɲ������������ⲿ�r(sh��)�Դ�(q��)��(d��ng)������XTAL2��(y��ng)�������
��?y��n)�һ��(g��)�C(j��)�����ں���6��(g��)��B(t��i)���ڣ���ÿ��(g��)��B(t��i)���ڞ�2��(g��)��ʎ������������һ��(g��)�C(j��)�����ڹ���12��(g��)��ʎ�������������ʯӢ���w��ʎ������ʎ�l�ʞ�12MHZ��һ��(g��)��ʎ���ڞ�1/12us����ʶ�һ��(g��)�C(j��)�����ڞ�1us����D13��ʾ��r(sh��)��·���
�D13 �r(sh��)��·�D
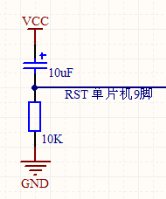
3.7 ��(f��)λ�·���O(sh��)Ӌ(j��)
��(f��)λ����һ��������Ԅ�(d��ng)��(f��)λ���ⲿ���I�ք�(d��ng)��(f��)λ�������Ƭ�C(j��)�ڕr(sh��)��·�����Ժ�, ��RESET�˳��m(x��)�o��2��(g��)�C(j��)�����ڵĸ��ƽ�r(sh��)�Ϳ�����ɏ�(f��)λ����������ʹ�þ����l�ʞ�12MHz�r(sh��)�������t��(f��)λ��̖(h��o)���m(x��)�r(sh��)�g��(y��ng)��С��2us�����O(sh��)Ӌ(j��)���õ����Ԅ�(d��ng)��(f��)λ�·����D14ʾ���(f��)λ�·��
�D14 ��(f��)��D
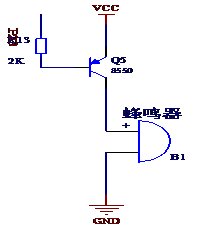
3.8 ���(b��o)���·���O(sh��)Ӌ(j��)
���D��ʾ�������һ��(g��)Speaker�����O�ܡ����ӵ���Ƭ�C(j��)��P13���_�ϣ���(g��u)�����(b��o)���·������D15ʾ�����(b��o)���·��
�D15 ���(b��o)���·�D
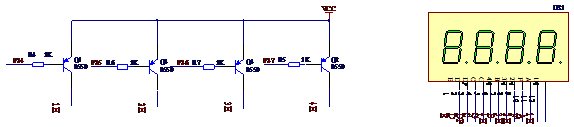
3.9 �@ʾģ�K
�@ʾģ�K���Ô�(sh��)�a���@ʾ�ӿ��·��D16
�D16 ��(sh��)�a���·
4 ܛ���O(sh��)Ӌ(j��) 4.1 �����������̈D
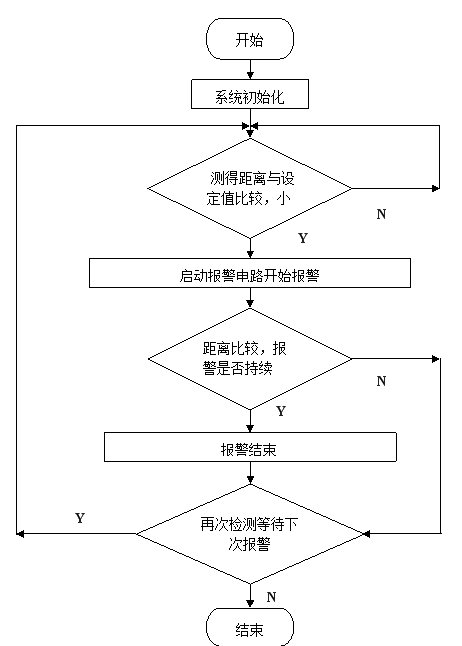
����������ԭ����Ӳ���Y(ji��)��(g��u)������֪ϵ�y(t��ng)�����������̈D���D17��ʾ����
�D17 �����������̈D
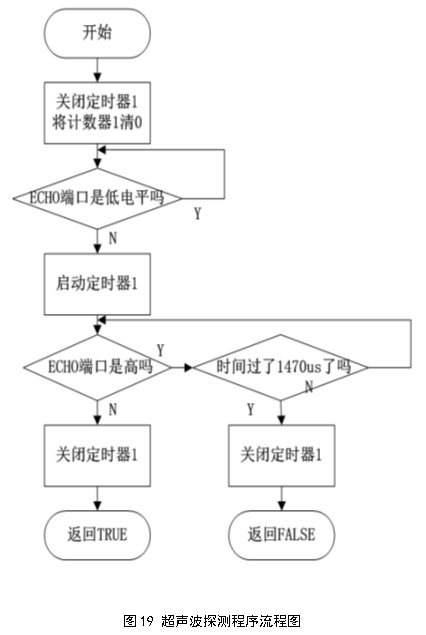
����̽�y(c��)�������̈D��
5 ���Y(ji��)
���O(sh��)Ӌ(j��)�о���һ�N���چ�Ƭ�C(j��)���g(sh��)�ij������ܜy(c��)����(b��o)��ϵ�y(t��ng)���ԓϵ�y(t��ng)ͨ�^(gu��)��STC89C52��Ƭ�C(j��)�鹤��̎�������ģ������������������һ�N�·f�ı���(d��ng)ʽ����̽�y(c��)�������܉��Էǽ��|�y(c��)��ǰ�����w���x����������D(zhu��n)��������(y��ng)�����̖(h��o)ݔ��.ԓ��(b��o)������������c(di��n)����ʹ�Ñ��܉������(ji��n)�Ρ�������`��������Ұ��b���������������Ըߡ��`��(b��o)�ʵ���������S���F(xi��n)���˂���ȫ���R(sh��)������(qi��ng)�Լ��ƌW(xu��)���g(sh��)�Ŀ��ٰl(f��)չ�����ň�(b��o)�����،��ڸ��V韵��I(l��ng)��õ�����Ӵεđ�(y��ng)�����
6 �����īI(xi��n)
[1] ������. ��Ƭ�C(j��)���Ƽt�⾀���I��(b��o)����[J]. �\�ݎ����W(xu��)Ժ�W(xu��)��(b��o), 2001.
[2] ���ľw. �������c�z�y(c��)���g(sh��)[M]. ����: �ߵȽ���������, 2004.
[3] ���a��. ��Ƭ�C(j��)ԭ�����ӿڼ��g(sh��)[M]. ����: ������ӿƼ���W(xu��)������, 2000.
[4] ���Ҳ�, �����. ����AT89C51�����ܟo(w��)��������(b��o)���� [J]. ����O(sh��)Ӌ(j��)��(y��ng)��, 2003, 5(6): 49��51.
[5] ��ȫ��. ��Ƭ�C(j��)ԭ�����ӿڼ��g(sh��)[M]. ����: �������պ����W(xu��)������, 2004.
[6] Ѧ���x, ������. MCS-51ϵ�І�Ƭ��Ӌ(j��)��C(j��)���䑪(y��ng)��[M]. ����: ������ͨ��W(xu��)������, 2005.
[7] ���(��i)�x, �����A. ��Ƭ�C(j��)��(j��)�Z(y��)��C51��(y��ng)�ó����O(sh��)Ӌ(j��)[M]. ����: �������պ����W(xu��)������, 2006.
[8] ���A��. ��Ӽ��g(sh��)���A(ch��)��ģ�M���֣�[M]. ����: �ߵȽ���������, 2004.
�� �����1��ԭ��D

��Ƭ�C(j��)Դ��������:
- #include <reg52.h>
- #include <intrins.h>
- #include "eepom52.h"
- #define uchar unsigned char
- #define uint unsigned int
-
- //��(sh��)�a�ܶ��x���x 0 1 2 3 4 5 6 7 8 9
- uchar code smg_du[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,
- 0x88,0x83,0xc6,0xa1,0x86,0x8e,0xff}; //��a
- //��(sh��)�a��λ�x���x
- uchar code smg_we[]={0xe0,0xd0,0xb0,0x70};
- uchar dis_smg[8] ={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8};
-
- sbit smg_we1 = P3^4; //��(sh��)�a��λ�x���x
- sbit smg_we2 = P3^5;
- sbit smg_we3 = P3^6;
- sbit smg_we4 = P3^7;
-
- sbit c_send = P3^2; //�����l(f��)��
- sbit c_recive = P3^3; //��������
- uchar flag_hc_value; //�������g׃��
-
- sbit beep = P2^3; //���Q��IO�ڶ��x
- bit flag_key_b_en,flag_key_set_en; //���I���Q��ʹ��
-
-
- uchar smg_i = 3; //�@ʾ��(sh��)�a�ܵĂ�(g��)λ��(sh��)
- bit flag_300ms ;
-
- bit key_500ms ;
-
-
- long distance; //���x
- uint set_d; //���x
- bit flag_csb_juli; //������������
- uint flag_time0; //�Á�(l��i)���涨�r(sh��)��0�ĕr(sh��)���
-
- // ���I��IO׃���Ķ��x
- uchar key_can; //���Iֵ��׃��
- uchar zd_break_en,zd_break_value; //�Ԅ�(d��ng)�˳��O(sh��)�ý���
- uchar menu_shudu = 10; //�Á�(l��i)�����B�ӵ��ٶ�
- bit flag_lj_en; //���I�B��ʹ��
- bit flag_lj_3_en; //���I�B3���B�Ӻ�ʹ�� �ӵĔ�(sh��)��Խ����
- uchar key_time,flag_value; //�����B�ӵ����g׃��
- uchar menu_1; //�ˆ��O(sh��)Ӌ(j��)��׃��
- uchar a_a;
-
-
- /***********************1ms�ӕr(sh��)����(sh��)*****************************/
- void delay_1ms(uint q)
- {
- uint i,j;
- for(i=0;i<q;i++)
- for(j=0;j<120;j++);
- }
-
- /***********************̎�����x����(sh��)****************************/
- void smg_display()
- {
- dis_smg[0] = smg_du[distance % 10];
- dis_smg[1] = smg_du[distance / 10 % 10];
- dis_smg[2] = smg_du[distance / 100 % 10] & 0x7f;
- }
-
- /******************�є�(sh��)��(j��)���浽��Ƭ�C(j��)��(n��i)��eepom��******************/
- void write_eepom()
- {
- SectorErase(0x2000);
- byte_write(0x2000, set_d % 256);
- byte_write(0x2001, set_d / 256);
- byte_write(0x2058, a_a);
- }
-
- /******************�є�(sh��)��(j��)�Ć�Ƭ�C(j��)��(n��i)��eepom���x����(l��i)*****************/
- void read_eepom()
- {
- set_d = byte_read(0x2001);
- set_d <<= 8;
- set_d |= byte_read(0x2000);
- a_a = byte_read(0x2058);
- }
-
- /**************�_(k��i)�C(j��)�ԙzeepom��ʼ��*****************/
- void init_eepom()
- {
- read_eepom(); //���x
- if(a_a != 1) //�µĆ�Ƭ�C(j��)��ʼ��Ƭ�C(j��)��(n��i)��(w��n)EEPOM
- {
- set_d = 100;
- a_a = 1;
- write_eepom();
- }
- }
- /****************��(d��)�����I̎������(sh��)********************/
- void key()
- {
- static uchar key_new = 0,key_old = 0,key_value = 0;
- if(key_new == 0)
- { //���I���_(k��i)�ĕr(sh��)�������֙z�y(c��)
- if((P2 & 0x07) == 0x07)
- key_value ++;
- else
- key_value = 0;
- if(key_value >= 5)
- {
- key_value = 0;
- key_new = 1;
- flag_lj_en = 0; //�P(gu��n)�]�B��ʹ��
- flag_lj_3_en = 0; //�P(gu��n)�]3���ʹ��
- flag_value = 0; //����
- key_time = 0;
- write_eepom();
- }
- }
- else
- {
- if((P2 & 0x07) != 0x07)
- key_value ++; //���I���µĕr(sh��)��
- else
- key_value = 0;
- if(key_value >= 5)
- {
- key_value = 0;
- key_new = 0;
- flag_lj_en = 1; //�B��ʹ��
- zd_break_en = 1; //�Ԅ�(d��ng)�˳��O(sh��)�ý�ʹ��
- zd_break_value = 0; //�Ԅ�(d��ng)�˳��O(sh��)�ý�׃������
- flag_key_b_en = 1; //���I���Q��ʹ��
- }
- }
- key_can = 20;
- if(key_500ms == 1) //�B��
- {
- key_500ms = 0;
- key_new = 0;
- key_old = 1;
- zd_break_value = 0;
- }
- if((key_new == 0) && (key_old == 1))
- {
- switch(P2 & 0x07)
- {
- case 0x06: key_can = 3; break; //�õ�k2�Iֵ
- case 0x05: key_can = 2; break; //�õ�k3�Iֵ
- case 0x03: key_can = 1; break; //�õ�k4�Iֵ
- }
- // dis_smg[3] = smg_du[key_can % 10];
-
- }
- key_old = key_new;
- }
-
-
- void smg_we_switch(uchar i)
- {
- switch(i)
- {
- case 0: smg_we1 = 0; smg_we2 = 1; smg_we3 = 1; smg_we4 = 1; break;
- case 1: smg_we1 = 1; smg_we2 = 0; smg_we3 = 1; smg_we4 = 1; break;
- case 2: smg_we1 = 1; smg_we2 = 1; smg_we3 = 0; smg_we4 = 1; break;
- case 3: smg_we1 = 1; smg_we2 = 1; smg_we3 = 1; smg_we4 = 0; break;
- }
- }
-
- /***********************��(sh��)�a�@ʾ����(sh��)*****************************/
- void display()
- {
- static uchar i;
- i++;
- if(i >= smg_i)
- i = 0;
- // P1 = 0xff; //���x
- // P3 = 0xf0 | (P3 & 0x0f); //λ�x
- // P3 = smg_we[i] | (P3 & 0x0f); //λ�x
- smg_we_switch(i);
- P1 = dis_smg[i]; //���x
-
- }
-
- void delay()
- {
- _nop_(); //��(zh��)��һ�l_nop_()ָ�����1us
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- _nop_();
- }
-
-
- /*********************�����y(c��)�����*****************************/
- void send_wave()
- {
- c_send = 1; //10us�ĸ��ƽ�|�l(f��)
- delay();
- c_send = 0;
- TH0 = 0; //�o���r(sh��)��0����
- TL0 = 0;
- TR0 = 0; //�P(gu��n)���r(sh��)��0���r(sh��)
- flag_hc_value = 0;
- while(!c_recive); //��(d��ng)c_recive����r(sh��)�ȴ�
- TR0=1;
- while(c_recive) //��(d��ng)c_recive��1Ӌ(j��)��(sh��)���ȴ�
- {
- flag_time0 = TH0 * 256 + TL0;
- if((flag_hc_value > 1) || (flag_time0 > 65000)) //��(d��ng)�������^(gu��)�y(c��)�������r(sh��)���@ʾ3��(g��)888
- {
- TR0 = 0;
- flag_csb_juli = 2;
- distance = 888;
- flag_hc_value = 0;
- break ;
- }
- else
- {
- flag_csb_juli = 1;
- }
- }
- if(flag_csb_juli == 1)
- {
- TR0=0; //�P(gu��n)���r(sh��)��0���r(sh��)
- distance = TH0; //�x�����r(sh��)��0�ĕr(sh��)�g
- distance = distance * 256 + TL0;
- distance +=( flag_hc_value * 65536);//��������y(c��)��ĕr(sh��)�g �õ���λ��ms
- distance *= 0.017; // 0.017 = 340M / 2 = 170M = 0.017M �����(l��i)����
- if(distance > 350) //���x = �ٶ� * �r(sh��)�g
- {
- distance = 888; //�������3.8m�ͳ�������������
- }
- }
- }
-
-
- /*********************���r(sh��)��0��������r(sh��)��1��ʼ��******************/
- void time_init()
- {
- EA = 1; //�_(k��i)����
- TMOD = 0X11; //���r(sh��)��0������r(sh��)��1������ʽ1
- ET0 = 1; //�_(k��i)���r(sh��)��0��
- TR0 = 1; //���S���r(sh��)��0���r(sh��)
- ET1 = 1; //�_(k��i)���r(sh��)��1��
- TR1 = 1; //���S���r(sh��)��1���r(sh��)
- }
-
- /****************���I̎�픵(sh��)�a���@ʾ����(sh��)***************/
- void key_with()
- {
- if(key_can == 1)
- {
- menu_1 ++;
- if(menu_1 >= 2)
- {
- menu_1 = 0;
- }
- if(menu_1 == 0)
- {
- menu_shudu = 20;
- dis_smg[0] = smg_du[distance % 10];
- dis_smg[1] = smg_du[distance / 10 % 10] ;
- dis_smg[2] = smg_du[distance / 100 % 10] & 0x7f;
- smg_i = 3;
- }
- if(menu_1 == 1)
- {
- menu_shudu = 1;
- dis_smg[0] = smg_du[set_d % 10];
- dis_smg[1] = smg_du[set_d / 10 % 10];
- dis_smg[2] = smg_du[set_d / 100 % 10] & 0x7f ;
- dis_smg[3] = 0x88;
- smg_i = 4;
- }
- }
- if(menu_1 == 1) //�O(sh��)�øߜ؈�(b��o)��
- {
- if(flag_lj_3_en == 0) //�����B��֮���ٶȼӿ�
- menu_shudu = 10 ; //500ms �Ӝpһ��
- else
- menu_shudu = 1; //250ms �Ӝpһ��
- if(key_can == 2)
- {
- set_d ++ ; //���I����δ���_(k��i)�Ԅ�(d��ng)������
- if(set_d > 350)
- set_d = 350;
- dis_smg[0] = smg_du[set_d % 10]; //ȡС��(sh��)�@ʾ
- dis_smg[1] = smg_du[set_d / 10 % 10] ; //ȡ��(g��)λ�@ʾ
- dis_smg[2] = smg_du[set_d / 100 % 10] & 0x7f; //ȡʮλ�@ʾ
- dis_smg[3] = 0x88; //a
- }
- if(key_can == 3)
- {
- set_d -- ; //���I����δ���_(k��i)�Ԅ�(d��ng)������
- if(set_d <= 1)
- set_d = 1;
- dis_smg[0] = smg_du[set_d % 10]; //ȡС��(sh��)�@ʾ
- dis_smg[1] = smg_du[set_d / 10 % 10] ; //ȡ��(g��)λ�@ʾ
- dis_smg[2] = smg_du[set_d / 100 % 10] & 0x7f ; //ȡʮλ�@ʾ
- dis_smg[3] = 0x88; //a
- }
- // write_eepom();
- }
- }
-
- /****************��(b��o)������(sh��)***************/
- void clock_h_l()
- {
- static uchar value;
- if(distance <= set_d)
- {
- value ++; //������(sh��)�H���x���O(sh��)�����x����׃���r(sh��)�ĸɔ_
- if(value >= 5)
- {
- beep = ~beep; //���Q����(b��o)��
- }
- }
- else
- {
- value = 0;
- beep = 1; //ȡ����(b��o)��
- }
- }
-
- /****************���I���·��Q�����**********************/
- void key_beep()
- {
- static uint value;
- if((flag_key_b_en == 1) && (flag_key_set_en == 1))
- {
- beep = 0; //���_(k��i)���Q��
- value ++;
- if(value > 800)
- {
- value = 0;
- flag_key_b_en = 0;
- beep = 1;//�P(gu��n)�]���Q��
- }
- }
- }
-
-
- void main()
- {
- send_wave(); //�y(c��)���x����(sh��)
- smg_display(); //̎�����x�@ʾ����(sh��)
- time_init();
- init_eepom(); //�xeepom��(sh��)��(j��)
- while(1)
- {
- if(flag_300ms == 1)
- {
- flag_300ms = 0;
- clock_h_l(); //��(b��o)������(sh��)
- send_wave(); //�y(c��)���x����(sh��)
- if(menu_1 == 0)
- smg_display(); //̎�����x�@ʾ����(sh��)
- if(zd_break_en == 1) //�Ԅ�(d��ng)�˳��O(sh��)�ý������
- {
- zd_break_value ++; //ÿ300ms��һ��
- if(zd_break_value > 100) //30����Ԅ�(d��ng)�˳��O(sh��)�ý���
- {
- menu_1 = 0; //
- smg_i = 3;
- zd_break_en = 0;
- zd_break_value = 0;
- }
- }
- }
- key(); //���I����(sh��)
- if(key_can < 10)
- {
- key_with(); //���I̎������(sh��)
- }
- }
- }
-
-
- /*********************���r(sh��)��0�����(w��)���� ���������y(c��)���************************/
- void time0_int() interrupt 1
- {
- set_d ++; // TH0 TL0 ��65536�������
- }
-
- /*********************���r(sh��)��0�����(w��)����************************/
- void time1_int() interrupt 3
- {
- static uchar value; //���r(sh��)10ms�Д�һ��
- TH1 = 0xf8;
- TL1 = 0x30; //2ms
- display(); //��(sh��)�a���@ʾ����(sh��)
- value++;
- if(value >= 150)
- {
- value = 0;
- flag_300ms = 1;
- }
- if(value % 25 == 0)
- {
- if(flag_lj_en == 1) //���°��Iʹ�� 50ms
- {
- key_time ++;
- if(key_time >= menu_shudu) //500ms
- {
- key_time = 0;
- key_500ms = 1; //500ms
- flag_value ++;
- if(flag_value >= 3)
- {
- flag_value = 10;
- flag_lj_3_en = 1; //3�κ�1.5����B�Ӵ�Щ
- }
- }
- }
- }
- }

0.png (52.11 KB, ���d��(sh��): 104)
���d����
2018-10-24 01:36 �ς�
ȫ���Y��51hei���d��ַ��
 �����y(c��)���xģ�K ��(sh��)�a��.rar
(11.14 MB, ���d��(sh��): 785)
�����y(c��)���xģ�K ��(sh��)�a��.rar
(11.14 MB, ���d��(sh��): 785)
2018-10-24 01:41 �ς�
�c(di��n)���ļ������d����
���d�e��: �ڎ� -5