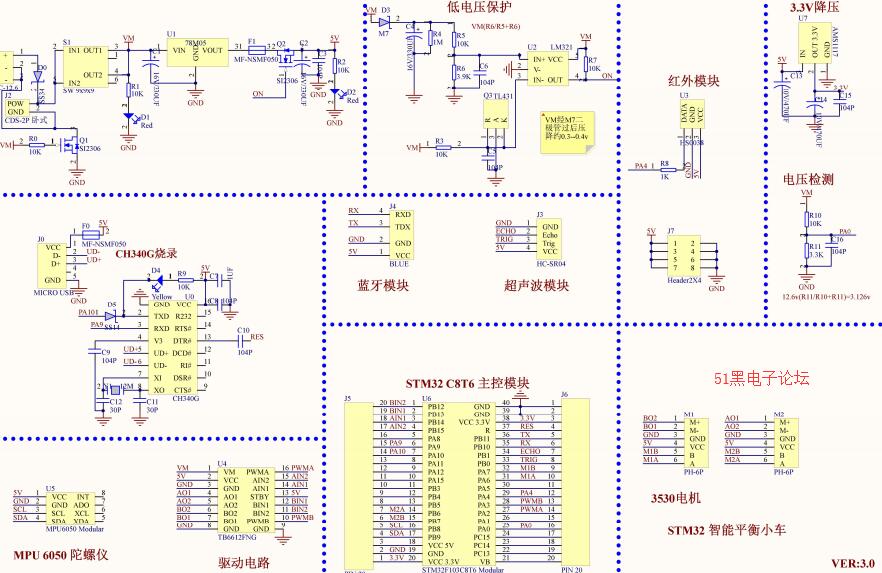
0.png (208.11 KB, 下載次數(shù): 64)
下載附件
2019-8-20 01:53 上傳
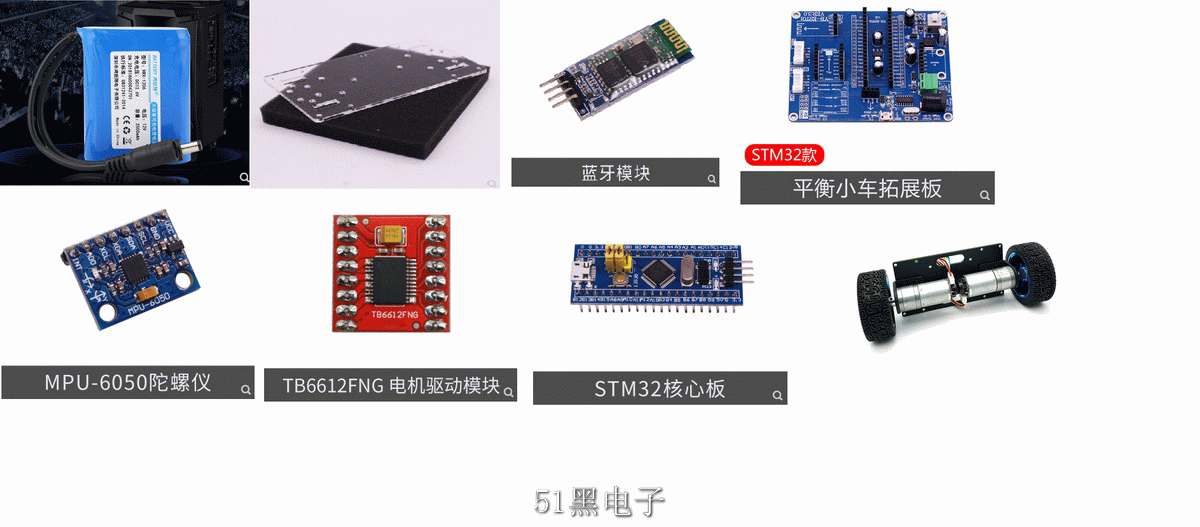
0.jpg (81.67 KB, 下載次數(shù): 71)
2019-8-20 01:52 上傳
1.png (890.05 KB, 下載次數(shù): 69)
2019-8-19 13:31 上傳
0.png (6.8 KB, 下載次數(shù): 64)


 平衡小車(chē).7z
(12.41 MB, 下載次數(shù): 124)
平衡小車(chē).7z
(12.41 MB, 下載次數(shù): 124)