|
<rt id="3iixy"></rt> |
<rt id="3iixy"></rt><label id="3iixy"></label> |
|
|
|
|
|
<i id="3iixy"></i> |
| |
|
����: UNICORN~ �r�g: 2019-12-28 16:15
���}: 51��Ƭ�C���Ʋ��M늙C�����D���{��Ԕ�� ���R���Z�Գ���
һ������OӋ�����c�����YԴ
1.�OӋ����:
��Ƭ�C�������ಽ�M늙C
�ٶȿ��{��������{
�ٶȲ��ö��r���Дʽ�팍�F(xi��n)
�R���Z�Ծ���
2.�������ܣ�
���M늙C���D
���M늙C���D
���M늙C�������p��
���r�������
3.�����YԴ:
һƬAT89C52
һ������늙C
һƬULN2003A
��Ƭ�C��Сϵ�y(t��ng)
1.�OӋҪ��
ͨ�^���I���Ʋ��M늙C���F(xi��n)���������D�ͼ�������p������������ԓ���F(xi��n)�˹��弉�{�����������ٜp�ٷքe�ɼ���ԭ����һ�����������wӋ�r�r�g���Q���ٶ�Ҋ�·���3С�cӋ��ɵá�
2.�OӋ˼·
�錍�F(xi��n)���M늙C�ٶȿ��{����������{��Ŀ���������Ҫ�õ����r�����r�Д��������}�_ÿ׃�Qһ�εĕr�g�������ˌ���OӋ˼·�ϲ���һ�����r�������ɂ��ⲿ�Д�������O��8�������D�����ִ浽ROM�Բ�����������քe�������M늙C�İ��������ͨ�^���I�Єe�����r��T0���r�Д�ʹ���M늙C�����O�Õr�g����ѭ�h(hu��n)ȡ�Ô�(sh��)�M��ÿ��ָᘼ�һ���x�oP1�����_��늙C�������ٶ�������������D������Ч����������ⲿ�Д�0������1�İ��I�քe���Ƽ��ٺ͜p�٣��_���ⲿ�Д�INT0�t���r�Δ�(sh��)�p������������_���ⲿ�Д�INT1�t���r�Δ�(sh��)�����Ԝp�������
���wܛӲ���O�÷��������ʹ�ö��r��ǰҪ���O�����r��T0����ڵ�ַ000BH,�O�ù�����ʽ�鷽ʽ1������O�ó�ֵ�������M�г�ʼ����������O���ⲿ�Д���INT0����ڵ�ַ0003H���ⲿ�Д���INT1��ڵ�ַ0013H������������M�г�ʼ����������Ʋ��M늙C�D���ٶ��c�����������҂���Ӳ���·�е�AT89C52��P3���B���Ă����o���քe���Ʋ��M늙C�ļ���������p�����������D�������D�������
��1�����D
�O��R3��1�r���M늙C���D��������µ��������oP3.6�r���R3=1�����������D�IJ�픵(sh��)ֵ������x�oP1�ڣ����M늙C���D����
��2�����D
���µ��Ă����oP3.7�r����R3=0�����������D��픵(sh��)ֵ����xֵ�oP1�ڣ����M늙C���D���
��3������
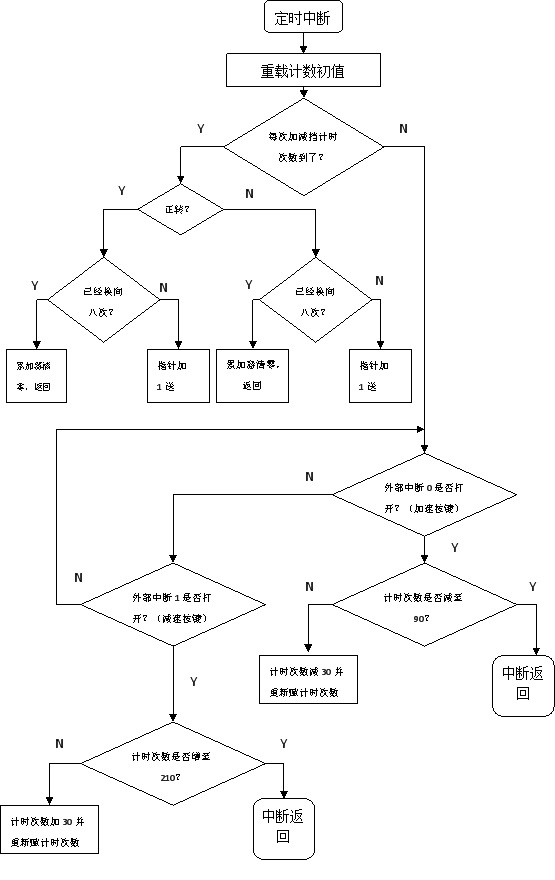
�O��Ӌ�r�Δ�(sh��)ֵR6=150��ͨ�^��׃ѭ�h(hu��n)�Δ�(sh��)�팍�F(xi��n)���Ʋ��M늙C���\�D�ٶ����������µ�һ�����oP3.2�r����������(zh��)���ⲿ�Д�T0���R6ÿ�μ���30��������210�������������°��µ�Ӌ�r�Δ�(sh��)ѭ�h(hu��n)�����������팍�F(xi��n)���M늙C�ļ��١�
��4���p��
���°��oP3.3�r����R6ÿ�Μpȥ30������p��90������������°��µ�Ӌ�r�Δ�(sh��)ѭ�h(hu��n)���팍�F(xi��n)�p���������
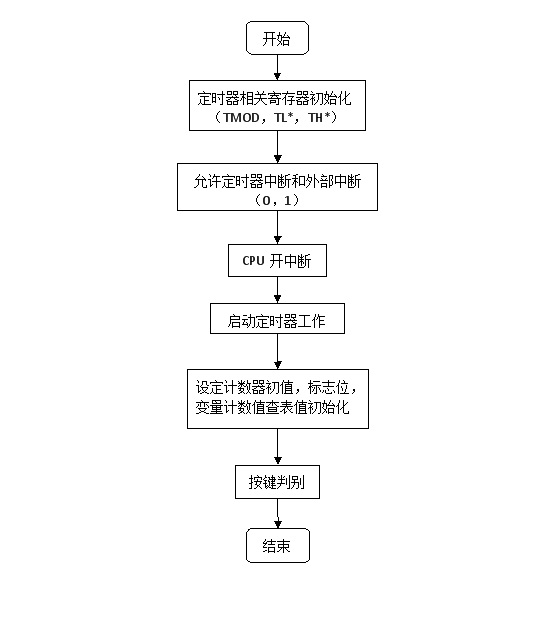
3.���PӋ���^�̣�
���}�_�g���r�g���D��׃�Q��Ӌ��������ɳ����g���r�g���A�ό������D���O�����TH0=0FEH,TL0=0C0H

һ���D�٣�������
������
�ļ���
�弉��
4.�OӋ���x
���M늙C��һ�N���V��ʹ�õĸБ�늙C����������Ĺ���ԭ���Ǯ�ݔ���}�_�r��������M�������յ�һ���}�_��̖����Ӳ��M늙C���O���ķ����D��һ���̶��ĽǶ�������
���M늙C�V�������ڸ��N�Ԅӻ�����ϵ�y(t��ng)������S���F(xi��n)�����g�İl(f��)չ����������M늙C�Ĺ���Ҳ���˸������������ں��β��M늙C�Ļ��A�������������˸�׃���M늙C�D�ӷ����c���Ӝp�ٲ��M늙C�D�ٵĹ��ܣ��U���˲��M늙C��ʹ�È��Ϸ����������
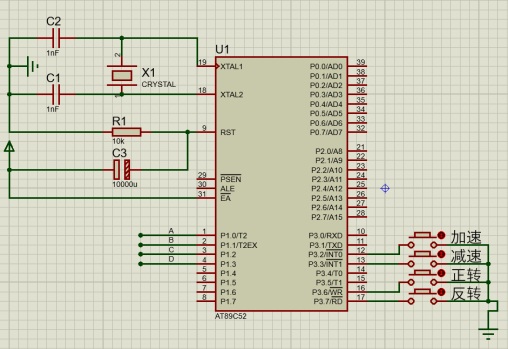
��������Ӳ���·�D
1.��Сϵ�y(t��ng)�����A��
������ϵ�y(t��ng)���^���Σ�����Ҫ������ⲿ�UչоƬ�����������x��һƬAT89C52����CPU�팍�F(xi��n)ϵ�y(t��ng)����������_�l(f��)�O���Ҫ��ܵͣ��_�l(f��)�r�gҲ�ܴ��s�̡��چ�Ƭ�C�ⲿ���ϕr��·�������λ�·���Դ�M�ɻ�����Сϵ�y(t��ng)ʹ���܉������\�С�
�D1.1��Сϵ�y(t��ng)
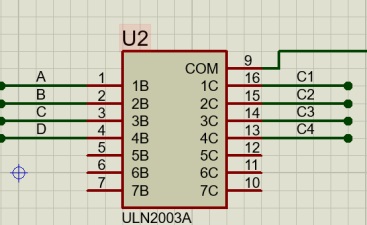
2.ULN2003
���҂����W������Сϵ�y(t��ng)֮���������҂��M����һ���̶��ϵ���չ���҂���Ŀ���Dz��M늙C���{����������������Ҫ�Ӳ��M늙C�����dž�Ƭ�C�Ĺ��_ݔ������^С������ֻ�����c�ׂ����������{���Ҳֻ��ʮ�ׂ������������(sh��)��Ƭ�Cֻ�Ўׂ����������ݔ�����늉�Ҳ����Խ�^5V�������@��ԭ������Æ�Ƭ�Cֱ�������O����ULN2003�����þ��ǰц�Ƭ�C����̖�M�У�7·���Ŵ��������{��������_��500mA�����͉�����Ҳ��ߺܶ����������ܝM���Ͳ��M늙C���������늉�����������Դ�ҽ������چ�Ƭ�Cݔ�����ϒ�ֻULN2003��ULN2003�Ǹ߉�������_���D���w�����ϵ�ЮaƷ�����������������ߡ�����늉����������ضȷ���������ؓ�d�����������c,�m���ڸ��Ҫ����ٴ����ӵ�ϵ�y(t��ng)������
�D1.2 ULN2003
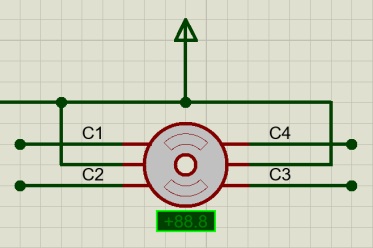
3.늄әC
���ڛ]����proteusܛ�����ҵ����ಽ�M늙C����˽��^�˶��ԇ���҂��xȡ�˷���Ч����õ���������늙C���M�з����������
�D1.3��������늄әC
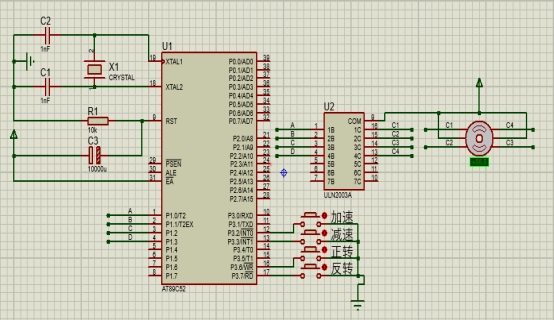
4.���·�D
�D1.4 ���·�D
��������(sh��)�M��ʹ��
�Æ�Ƭ�C��P1.0,P1.1,P1.2,P1.3�քe���Ʋ��M늙C��A,B,C,D���@�M���������ĵ�ͨ������Ξ�A-AB-B-BC-C-CD-D-DA���ɴ��҂����Եõ����Ŀ���ģ���������Զ��M�ƺ�ʮ���M���ڱ�1�нo������
��1������ĵ��������\�D��(sh��)�M
���������̈D


- ORG 0000H
- LJMP MAIN
- ORG 0003H ���ⲿ�Д�0���
- LJMP TIME0
- ORG 000BH ���������r�������
- LJMP T0_INT0
- ORG 0013H ���ⲿ�Д�1���
- LJMP TIME1
- ORG 0030H
-
- MAIN:
- MOV TMOD,#01H ��������O��T0������ʽ�鷽ʽ1
- MOV TH0,#0FEH ����O��T0��ֵ
- MOV TL0,#0CH
- SETB ET0
- SETB EA
- SETB TR0
-
- SETB EX0
- SETB EX1
- SETB IT0
- SETB IT1
- MOV R0,#10 ���O��Ӌ��(sh��)��ֵ
- MOV R1,#0 ��������ֵ��ʼ��
- MOV R3,#0 ������������־�Єeλ
- MOV R6,#150 ��������O��׃��Ӌ��(sh��)���Δ�(sh��)��ֵ
-
- LOOP: JB P3.6,AAA ���Д����D���I�Ƿ���
- MOV R3,#0
- AAA:
- JB P3.7,LOOP ��������Д෴�D���I�Ƿ���
- MOV R3,#1
- SJMP LOOP
-
-
-
- T0_INT0:
- MOV TH0,#0FEH
- MOV TL0,#0CH
- DJNZ R0,RETURN �����Д�Ӌ�r�Δ�(sh��)�Пo�����O���Δ�(sh��)ֵ
- MOV A,R6 ���������Ӌ�r�Δ�(sh��)���xֵ����_���Ӝp�nЧ��
- MOV R0,A
- MOV A,R1 ���Ӝp�ٺ��������Д�(sh��)ֵ�x�oA
- CJNE R3,#1,BBB ��������(R3)������1�t���D���ӳ���BBB
- MOV DPTR,#Vn_step1 ����(R3)����1�t�����\�Ќ�Vn_step1
- ��ԃ�������ָ�����ַ
- SJMP CCC
- BBB: MOV DPTR,#Vn_step2 ����� Vn_step2��ԃ��ָ�����
- ��ַ
- CCC: MOVC A,@A+DPTR ���ȡ��Ȕ�(sh��)ֵ�xֵ
- MOV P1,A ����ֵͨ�^�ۼ����xֵ�oP1��
- MOV A,R1 �����ʼ���ۼ���
- INC A ��������ԃ��ַ��1
- CJNE A,#8,DDD ��������Ȕ�(sh��)ֵ��ԃ���˰˴μ�����
- �t�����\�У���t���D��DDD�ӳ���
- CLR A ���������ۼ�������
-
- DDD: MOV R1,A ��������A�м�1��ı�Ȍ�����(sh��)ֵ�x��R1��
- ���_8λ�������ֵ�x�oR1
- RETURN:RETI �����r�����
-
- TIME0: ������ⲿ�Д�0�Д���ճ������ٰ��I
- CJNE R6,#90,JJJ ��������Ӌ�r�Δ�(sh��)�]�Мp��90������t���D
- ��JJJ
- SJMP KKK ����������ѽ��p��90��������t�Д��
- JJJ:
- MOV A,R6 ���������˕rӋ��(sh��)�Δ�(sh��)ֵ�x�oA
- SUBB A,#30 ����A�Д�(sh��)ֵ�p30���x�o
- MOV R6,A ������A�Д�(sh��)ֵ�x�oR6���µ�Ӌ�r�Δ�(sh��)
- KKK: RETI
-
- TIME1: ��������ⲿ�Д�1�Д���ճ����p�ٰ��I
- CJNE R6,#210,NNN �����Ӌ�r�Δ�(sh��)�]������210���t��
- �D��NNN
- SJMP MMM ������ѽ�����210���t�Д��
- NNN:
- MOV A,R6
- ADD A,#30
- MOV R6,A
- MMM: RETI
- Vn_step1: DB 01H,03H,02H,06H,04H,0CH,08H,09H
- Vn_step2: DB 09H,08H,0CH,04H,06H,02H,03H,01H
-
- END
���Ό����ࣨ�����������_����Ч�������M늙C����ϵ�y(t��ng)���OӋ���Ҫ��ͨ�^���I���Ʋ��M늙C���F(xi��n)�����D�Լ��ö��r���Д�ķ�ʽ�{��(ji��)�D�ٲ���ʹ�ÅR���Z�Ծ��̡�
�ھ��g���^���������˸��N���ӵ����y������������x���M늙C����������ܛ���Л]���҂���Ҫ������늄әC�������҂��_ʼ�����L�ćLԇ��·���������K�l(f��)�F(xi��n)��һ��Ч����õ������������M늙C�����ξ������挦ֻ�������D45�ȵIJ��M늙C�҂����������飬���Ͳ��ҷ����\��֮��l(f��)�F(xi��n)��һ̎�������������֮��Ҳֻ�������D85-90�ȡ��҂�������˼�S��������o�����Լ��ij����M�мm�e��Ҫ��ȫ���Ʒ����½���һ�N˼·δ�L�������������Lԇ��׃���Aʾ��ǰ���M�������ܛ����Ӳ���ğo��(sh��)��(li��n)�{�ĵ���r�¶��]���ã����Ժ��憖������������^���̽ӑ���M���Ʒ���֮ǰ��˼·�����������������OӋ˼·�ͳ����OӋ�������
���ϵ�Word��ʽ�ęn51�����d��ַ��
 02 ���M늙C�f����.docx
(224.8 KB, ���d��(sh��): 190)
02 ���M늙C�f����.docx
(224.8 KB, ���d��(sh��): 190)
2019-12-28 16:14 �ς�
�c���ļ������d����
���d�e��: �ڎ� -5
����: danpianji22 �r�g: 2020-9-27 12:47
�@���������ǂ���Ƭ�C�����ò��˰�
����: windone �r�g: 2021-12-15 15:03
���X���ã��������ǃ����ľ�
����: Ī�� �r�g: 2022-11-5 16:25
̫�������������ԭ��D������
����: �z�^���� �r�g: 2023-3-17 02:59
̫����������������õ���
����: woshitomge �r�g: 2023-3-18 22:41
���e���Y������x�x����������
����: dbkdz �r�g: 2023-4-29 23:52
ULN2003�l(f��)����������������h�Î��Xһ����MOS FET���������̖2N10 ����ֻ����������������Ч����ULN2003�á������ǿ���DC24V�����ಽ�M늙C�������2003���еġ�̫�C�������� ����ʲô�r��Ɍ�������2��IJ��M늙C�����أ�����W��������
| �gӭ���R (http://www.torrancerestoration.com/bbs/) |
Powered by Discuz! X3.1 |