ėň(bi®°o)Ó}: Üő∆¨ôC(j®©)Ņō÷∆÷ĪŃųŽäôC(j®©)Ćć¨F(xi®§n)ŽäôC(j®©)Ķń’ż∑īřD(zhu®£n)“‘ľį’{(di®§o)ňŔ≥Ő–Ú [īÚ”°ĪĺŪď]
◊ų’Ŗ: xlb ērťg: 2020-6-28 20:53
ėň(bi®°o)Ó}: Üő∆¨ôC(j®©)Ņō÷∆÷ĪŃųŽäôC(j®©)Ćć¨F(xi®§n)ŽäôC(j®©)Ķń’ż∑īřD(zhu®£n)“‘ľį’{(di®§o)ňŔ≥Ő–Ú
‘O(sh®®)”č∑Ĺįł∑Ĺįł“Ľ£ļÜő∆¨ôC(j®©)ĶńňńĹM≤Ę––Ņŕ£®P0����°ĘP1���°ĘP2°ĘP3£©‘ŕŹÕ(f®ī)őĽēr «łŖŽä∆Ĺ��£¨ń«√ī‘ŕ‘O(sh®®)”čįīśIĹ”ŅŕērŅ…“‘‘O(sh®®)”čěťĶÕŽä∆Ĺ”––ß�°£ģĒ(d®°ng)?sh®ī)ÕŽä∆ĹērŇ–ĒŗįīśIĪĽįīŌ¬»•£¨ąŐ(zh®™)––ŌŗÍP(gu®°n)Ķń≤Ŕ◊ų�°£
įīśIįīŌ¬»•ēĢīś‘ŕ∂∂Ą”¨F(xi®§n)Ōů°£»ÁĻŻĆ¶įīśIŖM(j®¨n)––”čĒĶ(sh®ī)�����£¨ēĢįl(f®°)¨F(xi®§n)Žm»Ľ÷ĽįīŌ¬»•“Ľīő�����£¨ňý”čĶńĒĶ(sh®ī)Ös≤Ľ“Ľ÷¬�����°£Ŗ@ė”ēĢĆß(d®£o)÷¬Śe’`Ķń≤Ŕ◊ų°£“Úīň–Ť“™Ć¶įīśIŖM(j®¨n)––ŌŻ∂∂�£¨įīśIĹ”Ņŕ÷Ľ «ąŐ(zh®™)––ÜőľÉĶńĪĽôzúyĻ¶ń‹£¨–Ť“™Őō ‚ĶńĻ¶ń‹ľńīś∆ų����£¨ňý“‘ Ļ”√P1Ņŕ°£
Ô@ ĺń£ČK≤…”√LCD1602“ļĺß∆Ń����£¨ Ļ”√Üő∆¨ôC(j®©)ĶńP0Ņŕ°£P0Ī»›^Őō ‚�£¨–Ť“™Õ‚Ĺ”…Ōņ≠Žä◊Ť≤Ňń‹’ż≥£ŖM(j®¨n)––›Ē≥Ų°��£ŅľĎ]ĶĹļÜĽĮ∑¬’śąDĶń‘O(sh®®)”č����£¨Ļ Ļ”√P0Ņŕ◊ųěťLCD1602“ļĺß∆Ń «ĒĶ(sh®ī)ďĢ(j®ī)∂ňŅŕ°£
”…”ŕ–Ť“™Ć¶ŽäôC(j®©)ŖM(j®¨n)––úyňŔļÕ†ÓĎB(t®§i)úy���£¨P3īś‘ŕ“Ľ–©Őō ‚ľńīś∆ųŅ…“‘ Ļ”√�����£¨Ļ Ī£ŃŰP3Ņŕ�°£∆šňŁĹ”ŅŕĺýĹ”‘ŕ≥żP3Ņŕ“‘Õ‚ĶńĹ”Ņŕ°£
÷ĪŃųŽäôC(j®©)ĶńřD(zhu®£n)ňŔŇc’żŌÚŽäŃų≥÷ņm(x®ī)ērťg≥…’żĪ»���£¨ Ļ”√PWM∑Ĺ Ĺģa(ch®£n)…ķ√}õ_���£¨ŽäôC(j®©)řD(zhu®£n)ňŔŖM(j®¨n)––’{(di®§o)ĻĚ(ji®¶)°£ĺŖůw»Áļőģa(ch®£n)…ķĄt Ļ”√∂®ēr∆ųT0ģa(ch®£n)…ķ÷–Ēŗ�����°£
úyňŔĄt Ļ”√T1∂®ēr∆ų�����°ĘÕ‚÷–ĒŗINT1ĹMļŌúyŃŅ�����°£Õ®Ŗ^Õ‚÷–ĒŗINT1Ķńōď(f®ī)ŐÝ◊ÉĀŪť_ÜĘT1”čēr∆ų��£¨Õ®Ŗ^úyŃŅÉ…īőōď(f®ī)√}õ_ĶńērťgťgłŰľīŅ…Ķ√ĶĹřD(zhu®£n)ňŔ£®ŽäôC(j®©)řD(zhu®£n)Ą”“Ľ»¶įl(f®°)≥Ų“Ľ∂®ērťLĶńłŖŽä∆Ĺ£©���°£
†ÓĎB(t®§i)ĶńúyŃŅĄt‘ŕ‘Ŕīő Ļ”√Õ‚÷–Ēŗ0°Ę1ĀŪÕÍ≥…���°£†ÓĎB(t®§i)úyŃŅ≤…”√Ŗ@ė”ĶńúyŃŅ∑Ĺ Ĺ÷Ľ–Ť“™úyŃŅ“ĽīőľīŅ…�£¨’ľ”√ērťgļ‹∂Ő£¨≤Ę«“ú (zh®≥n)ī_�°£
∑Ĺįł∂Ģ£ļƶ∑Ĺįł“ĽĶń≤Ņ∑÷ŖM(j®¨n)–––řłń°£įīśI≤Ņ∑÷ěťŃňŪĎĎ™(y®©ng)ú (zh®≥n)ī_����£¨≤…”√Õ‚Ĺ”łŖŽä∆ĹĶń∑Ĺ∑®°£
ŽäôC(j®©)úyňŔń£ČK£ļ»‘»Ľ≤Ľ◊É���°£
†ÓĎB(t®§i)úyŃŅłń≥…Õ®Ŗ^É»(n®®i)≤Ņĺé≥ŐÕÍ≥…úyŃŅ�����£¨≤Ľ–Ť“™Õ‚÷–Ēŗ0�°Ę1ĶńÖĘŇc�����°£
∑Ĺįł»ż£ļ»‘»ĽĆ¶∑Ĺįł“ĽŖM(j®¨n)–––řłń��°£įīśI≤Ņ∑÷ěťī_Ī£ú (zh®≥n)ī_–‘��£¨įīśIÕ‚≤ŅĹ”…ŌłŖŽä∆Ĺ��°£
PWM≤®–őģa(ch®£n)…ķń£ČK Ļ”√ĒĶ(sh®ī)ďĢ(j®ī)ŖxďŮ∆ųƶŽäôC(j®©)Ķń’ż∑īřD(zhu®£n)ŖM(j®¨n)––Ņō÷∆£¨ĹĶĶÕĺé≥ŐŽy∂»�����°£
2.2 ∑ĹįłŖxďŮ∑Ĺįł“ĽŖ^”ŕ◊∑«ůú (zh®≥n)ī_–‘��£¨ĺé≥ŐŹÕ(f®ī)Žs����£¨Ŗ^∂ŗĶńť_ÜĘ÷–ĒŗĆć¨F(xi®§n)Ļ¶ń‹Ňc∆šňŁ∑Ĺįł «“Ľė”Ķń£¨Ķę «īůŃŅėň(bi®°o)÷ĺőĽĶńť_ÜĘ–Ť“™ŐōĄe◊Ę“‚�£¨Õ¨ēr“™–°–ńēr–ÚÜĖÓ}°£Ć¶ĺé≥Őń‹Ń¶�����°ĘÖf(xi®¶)’{(di®§o)”–Ī»›^łŖĶń“™«ů����°£
∑Ĺįł∂Ģú (zh®≥n)ī_ĶńŐŠłŖŃňįīśIĶńú (zh®≥n)ī_–‘≤Ņ∑÷����£¨Õ®Ŗ^◊–ľö(x®¨)ŅľĎ]£¨Ňcť_Õ‚÷–ĒŗúyŃŅĪ»›^�����£¨ĺé≥Ő◊ÉļÜÜő°£»ę≤ŅĆć¨F(xi®§n)Ī»›^»›“◊���£¨ĶęěťĪ£◊Cú (zh®≥n)ī_–‘�����°Ę–Ť“™Õ®Ŗ^ĺé≥ŐŖM(j®¨n)––’{(di®§o)’Ż�°£
∑Ĺįł»żĹõ(j®©ng)Ŗ^◊–ľö(x®¨)ŅľĎ]����£¨ Ļ”√ĒĶ(sh®ī)ďĢ(j®ī)ŖxďŮ∆ųŽm»ĽĹĶĶÕŃň◊É≥…Žy∂»£¨‘ŕŖxďŮ–ĺ∆¨���°ĘŃňĹ‚–ĺ∆¨Ņ…ń‹–Ť“™∂ŗĽ®ērťg�����°£
◊ÓĹK’J(r®®n)ěť∑Ĺįł∂ĢĪ»›^Ņ…––�°£
2.3 ŌĶĹy(t®Įng)ŅÚąD’ŻāÄŌĶĹy(t®Įng)“‘Üő∆¨ôC(j®©)ěťļň–ń����£¨ŐéņŪ–ŇŌĘ��°£
- śIĪP£ļ”–7āÄśIĪP���£¨√ŅāÄśIĪP”–≤ĽÕ¨ĶńĻ¶ń‹°£śIĪPĶń›Ē»Ž–ŇŐĖŃų»ŽÜő∆¨ôC(j®©)–Ť“™ŖM(j®¨n)––ŌŻ∂∂�����£¨Ī‹√‚ģa(ch®£n)…ķÓA(y®ī)∆ŕÕ‚ĶńĹY(ji®¶)ĻŻ����°£
- STC89C51£ļōď(f®ī)ōü(z®¶)’ŻāÄŌĶĹy(t®Įng)Ķń–ŇŌĘŐéņŪ°£įŁņ®śIĪPĶń›Ē»Ž–ŇŐĖŐéņŪ��°ĘłýďĢ(j®ī)śIĪPĶń–ŇŐĖįl(f®°)≥ŲŽäôC(j®©)ÚĆ(q®Ī)Ą”–ŇŐĖ���°ĘƶŽäôC(j®©)ĶńňŔ∂»ļÕřD(zhu®£n)ŌÚŖM(j®¨n)––úyŃŅ����°ĘúyŃŅÕÍ≥…ĆĘ–ŇŌĘňÕĹoÔ@ ĺ����°£
- ŽäôC(j®©)ÚĆ(q®Ī)Ą”–ĺ∆¨£ļŽäôC(j®©)ňý–Ť“™ĶńÚĆ(q®Ī)Ą”ŽäŃųŌŗƶ”ŕSTC89C51÷ĪĹ”›Ē≥ŲĶńŽäŃų“™īÚĶń∂ŗ����£¨Ć¶ŽäôC(j®©)ĶńŅō÷∆≤ĽņŪŌŽ���°£∑īŖ^ĀŪÕ¨ė”ēĢ”įŪĎĶĹÜő∆¨ôC(j®©)Ķń’ż≥£Ļ§◊ų°£ňý“‘–Ť“™Õ®Ŗ^ÚĆ(q®Ī)Ą”–ĺ∆¨ĀŪÚĆ(q®Ī)Ą”÷ĪŃųŽäôC(j®©)����°£
- ŽäôC(j®©)£ļŽäôC(j®©)ěťMOTOR-ENCODER,”–őŚólĺÄ°£∆š÷–ĶńÉ…ól”√ĀŪ›Ē»ŽŽäŃųÚĆ(q®Ī)Ą”ŽäôC(j®©)���£¨ £”ŗĶń»żól읎äôC(j®©)Ķńĺéīa›Ē≥Ų����°£÷–ťgĶńĺÄ›Ē≥ŲŐō’ų읎äôC(j®©)řD(zhu®£n)Ą”“Ľ»¶›Ē≥Ų“ĽāÄ’ż√}õ_�°£ŖÖ…ŌÉ…āÄłýĺÄ›Ē≥ŲĶń√}õ_Ņ…’{(di®§o)£¨√}õ_ĶńŌŗőĽŌŗ≤Ó90∂»�£¨∑īĎ™(y®©ng)ŃňŽäôC(j®©)Ķń’ż∑īřD(zhu®£n)°£
- Ô@ ĺ£ļÔ@ ĺňý”√∆ųľĢěťLCD1602Ô@ ĺ∆ų����£¨Ô@ ĺŽäôC(j®©)řD(zhu®£n)ňŔ£¨’ż∑īřD(zhu®£n)†ÓĎB(t®§i)��°£
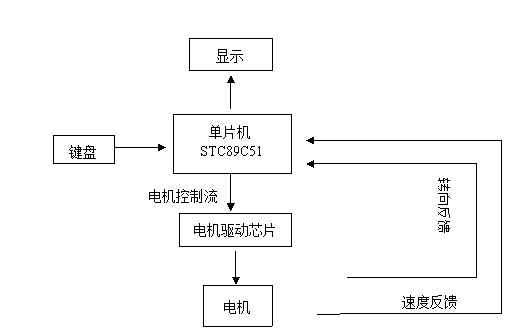
3.1 Ņāůw”≤ľĢ‘O(sh®®)”čŅāůw”≤ľĢ∑÷ěť£ļĺßůw’Ů é∆ųŽä¬∑°ĘŹÕ(f®ī)őĽŽä¬∑�°ĘįīśI›Ē»Žń£ČK°ĘÔ@ ĺŽä¬∑���°ĘŽäôC(j®©)ÚĆ(q®Ī)Ą”Žä¬∑�����°ĘŽäôC(j®©)ń£ČK���°£»ÁŌ¬ąD 3.1?1ňý ĺ
ąD 3.1?1
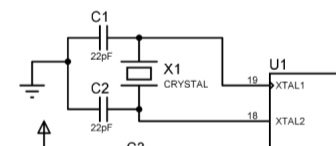
3.2 ĺßůw’Ů é∆ųŽä¬∑ĺß’ŮX1≤…”√11.0592MHZ£¨Žä»›C1���°ĘC2≤…”√Ķš–Õ÷Ķ22pF��°£»ÁąD 3.2?1�����°£‘ďŽä¬∑ĶńĻ¶ń‹ «ěťÜő∆¨ôC(j®©)ŐŠĻ©11.0529MHZĶńērÁä�����°£
ąD 3.2?1
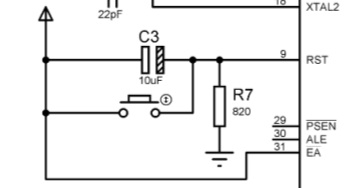
3.3 ŹÕ(f®ī)őĽŽä¬∑Žä¬∑ąD 3.3?1»Áňý ĺ°£ŹÕ(f®ī)őĽŽä¬∑Žä‘īěť+5V��°ĘŽä»›£®ėO–‘Žä»›£©C3≤…”√Ķš–Õ÷Ķ10uF°ĘŽä◊ŤR7ěť820öWń∑�°ĘįīśI°£‘ďŽä¬∑ěťÜő∆¨ôC(j®©)ŹÕ(f®ī)őĽ∂ňŅŕŐŠĻ©“Ľ∂®ērťgĶńłŖŽä∆Ĺ����£¨ģĒ(d®°ng)Üő∆¨ôC(j®©)įl(f®°)…ķģź≥£ērŅ…“‘Õ®Ŗ^įīśI ĻÜő∆¨ôC(j®©)ŹÕ(f®ī)őĽ°£»Ľļů’ż≥£Ŗ\(y®īn)––��°£∆š÷–EA/“żń_‘ŕīňŽä¬∑÷–≤Ľ–Ť“™ Ļ”√�£¨÷Ľ «Ĺ”…Ō»•Ńň∂Ý“—°£
ąD 3.3?1
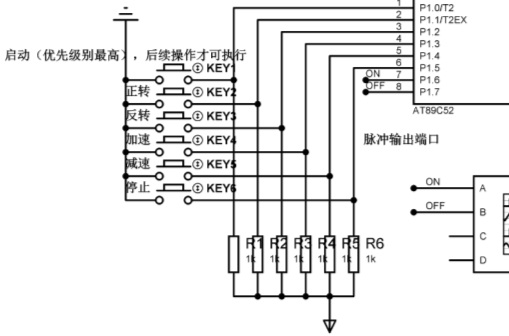
3.4 įīśI›Ē»ŽŽä¬∑Žä¬∑ąD»ÁąD 3.4?1ňý ĺ�����°£įīśIĻ≤”–6āÄ����£¨∑÷Ąe”–≤ĽÕ¨ĶńĻ¶ń‹°£įīśIĶńĻ¶ń‹‘ŕąD…Ō“—Ĺõ(j®©ng)ėň(bi®°o)≥Ų��°£ąD÷–ĶńŃýāÄŽä◊Ť◊Ť÷Ķěť1KöWń∑�£¨ěťŌřŃųŽä◊Ť°ĘŖÄ”–ĹĶČļĶń◊ų”√�°£ŽäČļõ]”–ėň(bi®°o)≥ŲĹy(t®Įng)“Ľěť+5V°£÷Ľ”–įīŌ¬įīśI1≤Ňń‹ÜĘĄ”∆šňŻįīśI°£
ąD 3.4?1
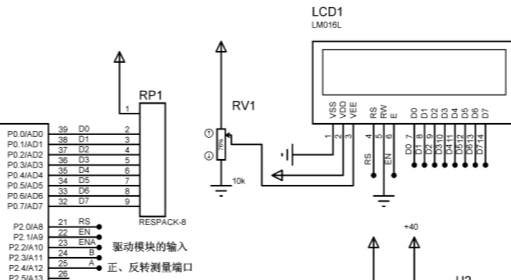
3.5 Ô@ ĺŽä¬∑Žä¬∑ąD»ÁąD 3.5?1ňý ĺ��°£“ļĺßÔ@ ĺń£ČKĒĶ(sh®ī)ďĢ(j®ī)ŅŕŇcÜő∆¨ôC(j®©)ĶńP0ŅŕŖBĹ”�£¨∆šňŁ∂ňŅŕÕ®Ŗ^ėň(bi®°o)ŐĖŇcP2.0°ĘP2.1ŖBĹ”���°£P0ŅŕŇc“ļĺßÔ@ ĺń£ČKĹĽďQ–ŇŌĘ�����°ĘP2.0�����°ĘP2.1Ņŕƶ“ļĺßŖM(j®¨n)––◊xĆĎ�����°Ę Ļń‹Ņō÷∆��°£
ąD 3.5?1
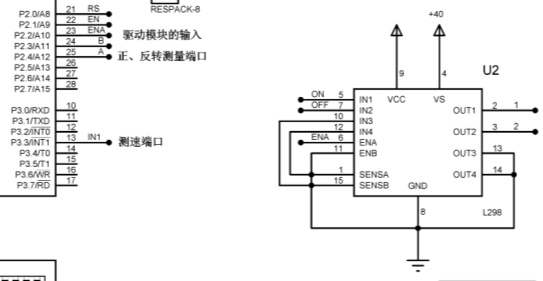
3.6 ŽäôC(j®©)ÚĆ(q®Ī)Ą”Žä¬∑Žä¬∑ąD»ÁąD 3.6?1ňý ĺ��°£ÚĆ(q®Ī)Ą”–ĺ∆¨–ÕŐĖěťL298∆šÚĆ(q®Ī)Ą”ń‹Ń¶ļ‹Źä(qi®Ęng)���°£VCCěť–ĺ∆¨ĶńŽä‘ī+5V���°ĘVS읎äôC(j®©)ÚĆ(q®Ī)Ą”ŽäČļ£¨◊ÓłŖěť45V�����°£IN1��°ĘIN2Ĺ”TTLŽä∆Ĺ���°ĘŇcÜő∆¨ôC(j®©)ėň(bi®°o)ŐĖěťON°ĘOFFĶń∂ňŅŕ£®ŽäôC(j®©)Ņō÷∆ŃųĶń›Ē≥Ų∂ňŅŕ£©ŖBĹ”���£¨ON�°ĘOFF∂ňŅŕ»ÁąD 3.4?1ňý ĺ��°£ENA�����°ĘENBěť–ĺ∆¨Ķń Ļń‹∂ň���£¨łŖŽä∆Ĺēr–ĺ∆¨Ļ§◊ų���°£ENAŅō÷∆∂ňŅŕIN1�°ĘIN2����°ĘOUT1°ĘOUT2���°£ĶÕŽä∆Ĺēr∂ňŅŕüo∑®Ļ§◊ų�����£¨üo∑®Ņō÷∆ŽäôC(j®©)�°£OUT1�°ĘOUT2Ĺ”÷ĪŃųŽäôC(j®©)›Ē»Ž∂ň°£ąD÷–Ĺ”ĶōĶń∂ňŅŕ‘ŕąD÷–”√≤ĽĶĹ��°£
ąD 3.6?1
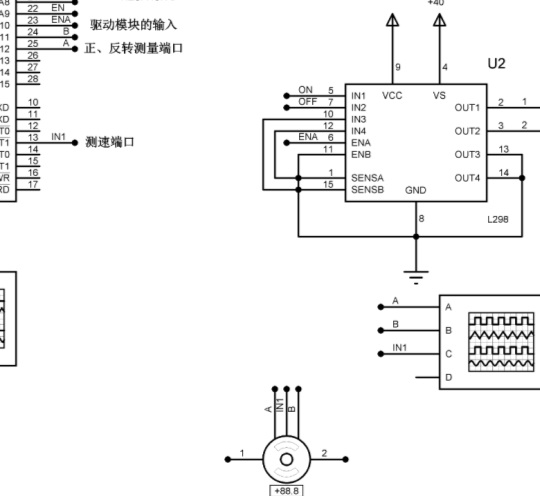
3.7 ŽäôC(j®©)ń£ČKŽä¬∑ąD»ÁąD 3.7?1ňý ĺ���°£ŽäôC(j®©)Ķń›Ē»Ž∂ňŅŕěť1��°Ę2���°£1ěťłŖŽä∆Ĺēr����£¨ŽäôC(j®©)’żřD(zhu®£n)2ěťłŖŽä∆Ĺēr�����£¨ŽäôC(j®©)∑īřD(zhu®£n)�����°£1��°Ę2Õ¨ěťłŖĽÚ’ŖĶÕŽä∆ĹĄt≤ĽřD(zhu®£n)��£¨ENAĶÕŽä∆Ĺ“≤≤ĽřD(zhu®£n)�����°£ŽäôC(j®©)ĶńA���°ĘBŇcÜő∆¨ôC(j®©)ĶńA°ĘBŖBĹ”�£¨”√”ŕŽäôC(j®©)†ÓĎB(t®§i)ĶńúyŃŅ°£IN1ŇcÜő∆¨ôC(j®©)ĶńIN1ŌŗŖB��£¨”√”ŕúyňŔ°£ĺŖůwŖBĹ”Ňcėň(bi®°o)ŐĖ‘ŕąD÷–“—ėň(bi®°o)◊Ę����°£
ąD 3.7?1
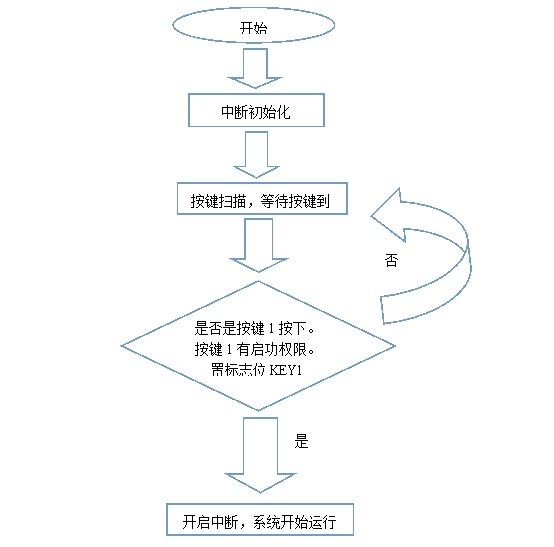
4.1 ąD–őĹÁ√ś‘O(sh®®)”č4.1.1 įīśIĹÁ√ś‘O(sh®®)”č»ÁąD 4.1?1ňý ĺ
įīśIíŖ√Ťń£ČK÷–”–6āÄįīśI£¨√ŅāÄįīśIēĢ’{(di®§o)Ą”ŌŗĎ™(y®©ng)Ķńń£ČK��°£≤ĘƶĒĶ(sh®ī)ďĢ(j®ī)ŐéņŪ���°£
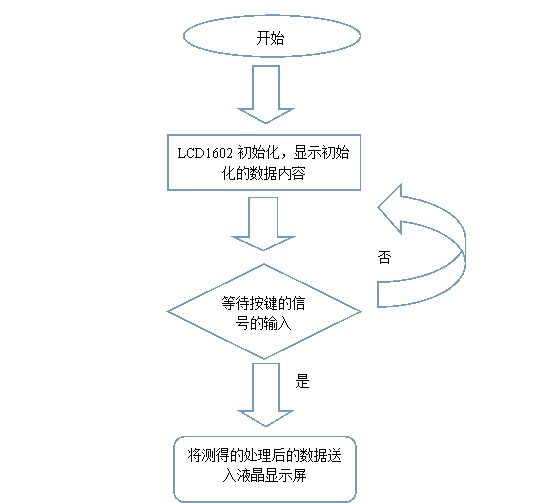
4.1.2 LCD1602ń£ČKĹÁ√śĹÁ√ś‘O(sh®®)”č»ÁąD 4.1?2ňý ĺ£ļ
Ô@ ĺń£ČKēĢÔ@ ĺŽäôC(j®©)ĶńŌŗÍP(gu®°n)–ŇŌĘ£®’żřD(zhu®£n)��°Ę∑īřD(zhu®£n)��°ĘňŔ∂»��°ĘŅ…“‘ľ”…ŌŽäôC(j®©) «∑Ůľ”ňŔĶń�����°ĘúpňŔĶńúy‘á�°Ę“‘ľįÔ@ ĺ£©�����£¨Ô@ ĺ«įĆĘ“ņďĢ(j®ī)įīśI›Ē»ŽĶń–ŇŐĖŖM(j®¨n)––Ŗ\(y®īn)ň„�£¨ŐéņŪļůňÕ»Ž“ļĺß÷–���°£
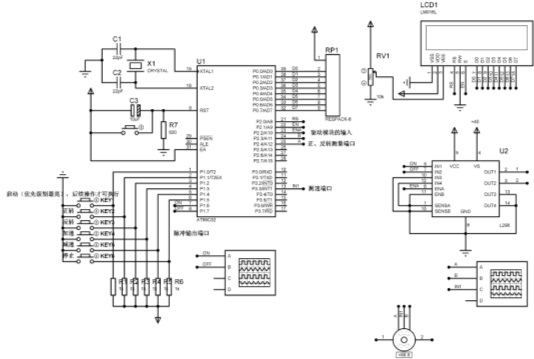
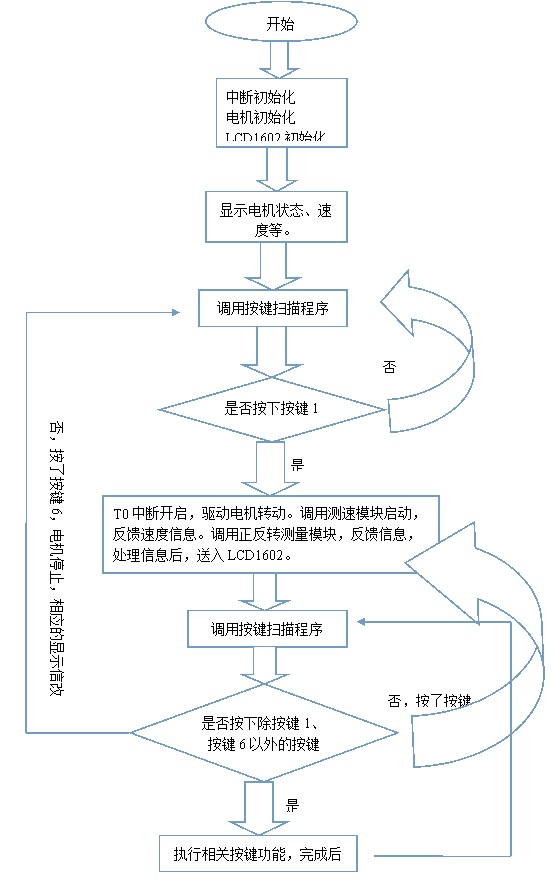
5.1 ≥Ő–ÚŃų≥ŐąD÷ų≥Ő–ÚŃų≥ŐąD»ÁąD 5.1?1ňý ĺ°£
6.1 ”≤ľĢ’{(di®§o)‘á‘ŕī_∂®∑Ĺįłļů���£¨Ī„ť_ ľīÓĹ®”≤ľĢ��°£ŹńŽy“◊≥Ő∂»ĀŪŅī�����£¨‘ď’nÓ} «Ī»›^ļÜÜőĶńňý“‘”≤ľĢ≤Ņ∑÷īÓĹ®»›“◊£¨īÓĹ®ÕÍ≥…ľīŅ…���°£ť_ ľ∑Ĺįł «ŖxďŮ∑Ĺįł“Ľ��£¨–Ť“™ Ļ”√∂ŗāÄ÷–Ēŗ��£¨–Ť“™–řłńĶńÉHÉH «Žä¬∑ĶńŖBĹ”��°£ļů√śįl(f®°)¨F(xi®§n)∑Ĺįł“ĽŖ^”ŕŹÕ(f®ī)Žs�����£¨łń”√∑Ĺįł∂Ģ����£¨Ć¶–Ť“™–řłńĶńŖBĹ”Žä¬∑‘Ųľ”ėň(bi®°o)ŐĖľīŅ…°£
6.2 ≥Ő–Ú’{(di®§o)‘á”…”ŕ «◊‘ľļĆĎ≥Ő–Ú��£¨Ĺõ(j®©ng)Úě≤Ľ◊„����°ĘňŔ∂»¬ż£¨»›“◊≥Ų¨F(xi®§n)ÜĖÓ}�°£ěťŃňĪ£◊C√Ņ“ĽāÄ≠h(hu®Ęn)ĻĚ(ji®¶)ĶĹőĽ£¨≤…”√ŖÖĆĎ≥Ő–Ú����°ĘŖÖ’{(di®§o)‘áĶń∑Ĺ∑®°£
◊ÓŌ»ť_ ľĶńń£ČK «Ô@ ĺń£ČK�����°£Ô@ ĺń£ČK Ļ”√∆ųľĢěťLCD1602�����£¨‘ŕÜő∆¨ôC(j®©)Ķń÷–ĆW(xu®¶)Ŗ^◊ŲŖ^ÍP(gu®°n)”ŕŖ@āÄ∆ųľĢĶńĆćÚě�£¨Ć¶∆ųľĢŃňĹ‚”–“Ľ–©£¨Ķę≤Ľ «ļ‹ žŌ§°£Ć¶‘≠ĀŪĶń≥Ő–Úõ]”–ŖM(j®¨n)––∑‚—b����£¨◊Óť_ ľ≥Ų¨F(xi®§n)ĒĶ(sh®ī)ďĢ(j®ī)ňÕ»ŽőĽ÷√Śe’`£¨‘ž≥…ÓA(y®ī)∆ŕ÷ģÕ‚ĶńĹY(ji®¶)ĻŻ���°£∂ÝļůÕ®Ŗ^◊–ľö(x®¨)≤ťŅī’nĪĺ…ŌĶńŔYŃŌ���£¨Õ®Ŗ^őĽ÷√ƶ’’£¨–řłńļů����£¨“ļĺßÔ@ ĺń£ČK≥ű≤Ĺ?j®©ng)]”–ÜĖÓ}°£
ŽäôC(j®©)Ņō÷∆ń£ČK£ļƶŽäôC(j®©)Ņō÷∆–Ť“™ Ļ”√÷–Ēŗ�°Ę‘ŕ÷–ĒŗņÔ√śģa(ch®£n)…ķ∑Ĺ≤®–ŇŐĖ£¨≤Ę«“∑Ĺ≤®Ķń’ľŅ’Ī»Ņ…’{(di®§o)�£¨ŽäôC(j®©)Ņō÷∆Ńų›Ē≥ŲÕ®ĶņŖxďŮ“≤‘ŕŖ@āÄń£ČK�����°£‘ŕŖ@āÄń£ČKÕÍ≥…«į–Ť“™ÕÍ≥…“Ľ≤Ņ∑÷śIĪPíŖ√ŤļĮĒĶ(sh®ī)Ķń‘O(sh®®)”č���°£ģĒ(d®°ng)“‘…Ō≥Ő–ÚÕÍ≥…≤ĘŖ\(y®īn)––ļů���£¨Õ®ĶņŖxďŮļÕ’ľŅ’Ī»∂ľ≥Ų¨F(xi®§n)ŃňÜĖÓ}��°£◊Óť_ ľ «üo’ďįī ≤√īśIŽäôC(j®©)∂ľ≤ĽřD(zhu®£n)����£¨”ŕ «ļű’{(di®§o)’Ż≥Ő–Ú�����£¨ ◊Ō»įl(f®°)¨F(xi®§n)Üő∆¨ôC(j®©)ňńĹM∂ňŅŕŹÕ(f®ī)őĽļů›Ē≥ŲěťłŖŽä∆Ĺ�£¨ľīĪŪ ĺŽäôC(j®©)Õ£řD(zhu®£n)£¨–Ť“™Ć¶ŽäôC(j®©)›Ē≥Ų∂ňŅŕ≥ű ľĽĮ�£¨∂ľěťĶÕŽä∆Ĺ°£»ĽļůŖM(j®¨n)––Ņō÷∆����°£√}õ_≤®–őĶń’ľŅ’Ī»Ķń’{(di®§o)ĻĚ(ji®¶)£¨‘O(sh®®)ŃĘ∂ŗāÄ»ęĺ÷◊ÉŃŅ�£¨‘O(sh®®)÷√…ŌŌ¬Ōř£¨Ŗ@ė”≤®–ő’ľŅ’Ī»’{(di®§o)ĻĚ(ji®¶)õ]”–ÜĖÓ}���°£ŽäôC(j®©)›Ē≥Ų–ŇŐĖÕ®ĶņŖxďŮ�����£¨”…”ŕĆĎ≥Ő–ÚĹõ(j®©ng)Úě≤Ľ◊„����£¨ŖČ›č…Ō≥Ų¨F(xi®§n)ŃňŚe’`£¨Ćß(d®£o)÷¬ŌŽ“™Õ‚Ĺ”ĒĶ(sh®ī)ďĢ(j®ī)ŖxďŮ∆ųĀŪ’{(di®§o)ĻĚ(ji®¶)–ŇŐĖ›Ē≥Ų�����£¨ŖM(j®¨n)∂ÝŅō÷∆ŽäôC(j®©)’ż∑īřD(zhu®£n)����°£◊ÓļůĹõ(j®©ng)Ŗ^ĆćÚěįl(f®°)¨F(xi®§n)Ŗ@āÄ∑Ĺ∑®Ćć¨F(xi®§n)∆ūĀŪĪ»›^ņߎy£¨ňľ¬∑õ]”–����°£ŖÄ «Źń÷–ĒŗņÔ√śŖM(j®¨n)––’{(di®§o)ĻĚ(ji®¶)ļ√“Ľ–©°£◊ÓĹKĆć¨F(xi®§n)ŃňŽäôC(j®©)Ķń’{(di®§o)ĻĚ(ji®¶)����°£
ŽäôC(j®©)řD(zhu®£n)ŌÚúyŃŅń£ČK£ļīňń£ČKÕÍ≥…ļů‘ŕ∂ŗīőĶń’{(di®§o)‘áŖ^≥Ő÷–įl(f®°)¨F(xi®§n) Ļ”√while’Zĺšń™√Ż∆ś√ÓƶŽäėOŅō÷∆ń£ČKģa(ch®£n)…ķŃň”įŪĎ°£ěťŃňĪ£◊CŽäôC(j®©)Ņō÷∆ń£ČKõ]”–ÜĖÓ}����£¨Ć¶řD(zhu®£n)ŌÚń£ČK÷ō–¬ŖM(j®¨n)––Ńň‘O(sh®®)”č����£¨ņŪ’ď∑÷őŲ�°£Ķę «”…”ŕērťgÜĖÓ}��£¨õ]ń‹ÕÍ≥…��°£
úyňŔń£ČKĶń’{(di®§o)ĻĚ(ji®¶)£ļúyňŔń£ČK–Ť“™∂®ēr∆ų1ļÕÕ‚÷–Ēŗ1ÕÍ≥…�����°£úyňŔń£ČKÕÍ≥…ļů–Ť“™ŇcÔ@ ĺń£ČKĻ≤Õ¨ÕÍ≥…�°£”…”ŕīň«į‘ŕŖxďŮ∑ĹįłĶńērļÚ£¨Ŗ^∑÷“ņŔá÷–ĒŗļÕ∂®ēr∆ų�£¨ŖM(j®¨n)––Ńň›^ťLērťgĶń’ď◊C£¨ŽäôC(j®©)Ņō÷∆ń£ČKĶń’{(di®§o)‘á”…”ŕ «āÄ»ňĺé≥ŐňľŌŽļÕń‹Ń¶ÜĖÓ}Ćß(d®£o)÷¬Ľ®ŔM(f®®i)ŃňīůŃŅĶńērťg�����°£úyňŔń£ČKŽm»ĽÕÍ≥…�����£¨Ķę «õ]”–ērťg’{(di®§o)‘á�°£

51hei.png (10.23 KB, Ō¬›dīőĒĶ(sh®ī): 89)
Ō¬›dłĹľĢ
2020-7-1 03:02 …Ōāų
»ę≤ŅŔYŃŌ51heiŌ¬›dĶō÷∑£ļ
◊ų’Ŗ: petaraca ērťg: 2021-4-19 15:13
ńķļ√£¨»ÁĻŻ“™Ņō÷∆É…āÄ÷ĪŃųŽäôC(j®©)Ķń‘íĎ™(y®©ng)‘ď‘ű√ī‘O(sh®®)÷√ńō���£Ņ
| ög”≠Ļ‚ŇR (http://www.torrancerestoration.com/bbs/) |
Powered by Discuz! X3.1 |
 ÷ĪŃųŽäôC(j®©)ÚĆ(q®Ī)Ą”.rar
(2.69 MB, Ō¬›dīőĒĶ(sh®ī): 130)
÷ĪŃųŽäôC(j®©)ÚĆ(q®Ī)Ą”.rar
(2.69 MB, Ō¬›dīőĒĶ(sh®ī): 130)