���}: ���]�h(hu��n)���l�ܲ�����ֱ���{��ϵ�y(t��ng)���挍� [��ӡ���]
����: 1692489839 �r�g: 2020-7-21 09:59
���}: ���]�h(hu��n)���l�ܲ�����ֱ���{��ϵ�y(t��ng)���挍�
�@�������Ć��]�h(hu��n)�����{��ϵ�y(t��ng)���
�W������τӵĿ��Կ���
һ�����Ŀ��
��1������A��������������]�h(hu��n)������ֱ���{��ϵ�y(t��ng)��ԭ��������M�ɼ�����Ҫ��Ԫ������ԭ������
��2���������Ɇ��]�h(hu��n)ֱ���{���{��ϵ�y(t��ng)�ĵĽ�ģ���棻
��3������������Յ���(sh��)׃����ϵ�y(t��ng)���ܵ�Ӱ��������
��4���������ϤSimulink���沢�������ϵ�y(t��ng)ģ���M��ֱ���{��ϵ�y(t��ng)�ķ������
�������Ҫ��
1�����_�h(hu��n)ֱ���{��ϵ�y(t��ng)���潨���_�h(hu��n)ֱ���{��ϵ�y(t��ng)�ķ���ģ�Ͳ��M�з��������^�y���L��ֱ��늄әC���D���c늘��������������
2�����D�ن��]�h(hu��n)ֱ���{��ϵ�y(t��ng)���潨���o�o���D��ؓ�������]�h(hu��n)ֱ���{��ϵ�y(t��ng)ģ�Ͳ��M�з���������^�y���L��ֱ��늄әC���D��������늘����������������׃ؓ�d��С���^�y���L��ؓ�d��׃�r�����ֱ��늄әC���D���������늘�����������������׃ϵ�y(t��ng)���OӋ����(sh��)�������ͷe��ϵ��(sh��)�������^�y����(sh��)׃����ϵ�y(t��ng)���ܵ�Ӱ�������������팍���������c���팍��Ќ��Hʹ�Å���(sh��)��r��ͬ�Ͳ�ͬ�r�ķ���Y���M�Ќ��ȷ�����
�����������E
��1�����M��MATLAB����Γ�MATLAB����ڹ��ߙ��е�SIMULINK�D�ˣ���ֱ���I��SIMULINK��������������_SIMULINKģ�K�g�[�������������
��2�������_ģ�;����ڣ�ͨ�^�Γ�SIMULINK���ߙ�����ģ�͵ĈD�˻��x��File��New��Model�ˆ�헌��F(xi��n)�����
��3����������������Pģ�K������(j��)���OӋ��ϵ�y(t��ng)�������ҵ���Ҫ�����Pģ�K�������������I�x�У�����ģ�;�������������p��ģ�K�D������t���F(xi��n)�P��ԓ�D���Č�Ԓ��ͨ�^�Č�Ԓ����݁��O��ģ�K�ą���(sh��)�������
��4��������ģ�K����(sh��)���p��ģ�K�D�����t���F(xi��n)�P��ԓ�D���Č�Ԓ�����ͨ�^�Č�Ԓ����݁��O��ģ�K�ą���(sh��)��
��5�����ģ�K���B�ӣ���������I�c�����cģ�Kݔ���ˣ��τ�������K�cģ�Kݔ���̎��������t�ڃ�ģ�K�g�a�������������������һ����̖Ҫ���͵���ͬģ�K��ݔ��˕r������Ҫ�L�Ʒ�֧�����ͨ���ɰ�����Ƶ������ķ�֧�������c̎�������������˵����I�������������׃?y��u)�ʮ�ֺ��τ����ֱ����֧���ĽK�c̎������ጷ���˰��o���������˷�֧�����L��������
���������OӋ��(sh��)��(j��)������ģ�;����ڣ�����PI�{��(ji��)����ֵ����(j��)�O��ֵݔ��������磨Kp=15��������H��(sh��)��(j��)��������Ȼ�����(j��)ϵ�y(t��ng)ģ�K�D�B�Ӹ�ģ�K������
��6�������������ģ�͵��\�У�
1.���慢��(sh��)���O�ã������������^�y����Y�������Ҫ��ʾ�����@ʾ��ʽ��һ���ģ���ʾ������Ĭ�Jֵ��һ�Ą��������Ąӵķ����ж�N���������һ�N�������x��SIMULINKģ�ʹ��ڵ�Simulation��Configuration Parameters�ˆ�헣����_������ƅ���(sh��)��Ԓ����������������ƅ���(sh��)�M���O�á� ���е�Start time��Stop time��Ŀ�քe���S��������ʼ�r�g�ͽY���r�g�������Y���r�g���Ը���(j��)���H��r�M���ġ�
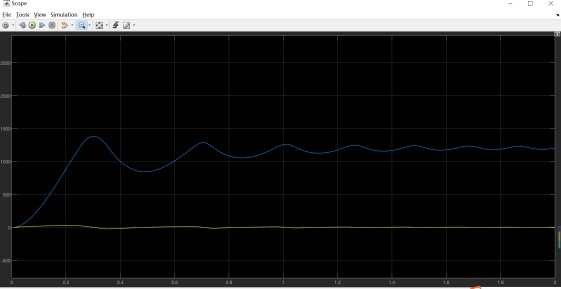
2.�����^�̵Ć��ӣ��Γӷ��湤�ߗl�İ��o���x��Simulation��Start�ˆ�������t�Ɇ��ӷ����^��������p��ʾ����ģ�K�Ϳ����@ʾ����Y��������Scope���ߗl�еĵ��������o�����h�R��[�Ԅӿ̶ȣ�Autosale��]�����������ʹ��ǰ������̖�������Сֵ��v���˵�����������Ķ��õ������ķ���Y��������
(7)�����{��(ji��)������(sh��)���{���������������ķ���ģ��������׃����ϵ��(sh��)�ͷe��ϵ��(sh��)������������p�����e�صõ���ʎ�����o������o�o����{��ӿ�Ȳ�ͬ���ٶ����������������ѷe�ֲ���ȡ�������׃����ϵ��(sh��)�����Եõ���ͬ�o���ʵ�푑�����ֱ����ʎ��������������׃PI�{��(ji��)���ą���(sh��)���������Եõ��D��푑��ij��{����һ��������{��(ji��)�r�gҲ��һ�ӵ�푑�������ͨ�^���ȿ�������ϵ�y(t��ng)�ķ�(w��n)���ԺͿ�������һ��ì�������횸���(j��)���̵���Ҫ���x��һ�����m��PI����(sh��)�����������SIMULINKܛ����ϵ�y(t��ng)�OӋ�ṩ�ķ���ƽ�_��������x����m��PI����(sh��)���M��ϵ�y(t��ng)������ָ���������
�����������Y��
1���_�h(hu��n)�rϵ�y(t��ng)���D���������������
- ���]�h(hu��n)������ֱ���{��ϵ�y(t��ng)���D�١��������
3���������׃ؓ�d��С����������]�h(hu��n)������ֱ���{��ϵ�y(t��ng)���D��������������
4�������׃�����e���{��(ji��)���ą���(sh��)������^�y����(sh��)��ϵ�y(t��ng)���ܵ�Ӱ�
����(sh��)�ij�10,-10
Ӱ푣�ϵ�y(t��ng)��ʎ�Δ�(sh��)���࣬�{��(ji��)�r�g���L������p���˷�(w��n)�B(t��i)�`��
- �������팍��������c���팍��Ќ��Hʹ�Å���(sh��)��r��ͬ�Ͳ�ͬ�r�ķ���Y���M�Ќ��ȷ���
���뻯ģ���������ȥ�����ⲿ�����،�Ԫ����Ӱ�������ړp�ĵĿ��]��ȫ����������c��Փֵ����С�ą^(q��)�e�������������`�Ǚz�������Ψһ�˜����������dz��J����ĽY�����������Դ��M�з����������ͨ�^ģ�́����⌍�H��r�����
���ϵ�Word��ʽ�ęn51�����d��ַ��
 ���]�h(hu��n).docx
(203.72 KB, ���d��(sh��): 8)
���]�h(hu��n).docx
(203.72 KB, ���d��(sh��): 8)
2020-7-21 09:58 �ς�
�c���ļ������d����
���d�e��: �ڎ� -5
| �gӭ���R (http://www.torrancerestoration.com/bbs/) |
Powered by Discuz! X3.1 |