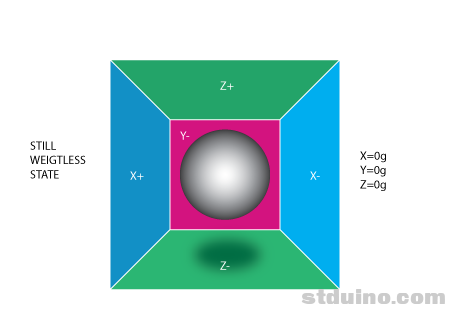
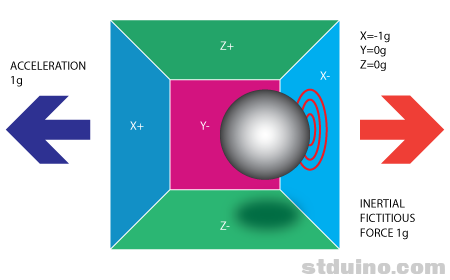
就像上面的圖片一樣,在一個(gè)立方體的盒子里面有一個(gè)小球�����,盒子的四壁是用石英晶體材料����。當(dāng)盒子加速度發(fā)聲變化時(shí),由于慣性的作用���,球就會(huì)向與加速度方向相反的地方傾斜��,當(dāng)小球碰到那里就會(huì)產(chǎn)生壓電電流���,通過此電流可以確定該方向上加速度大小(實(shí)際測(cè)得的是壓力的大小))�����。
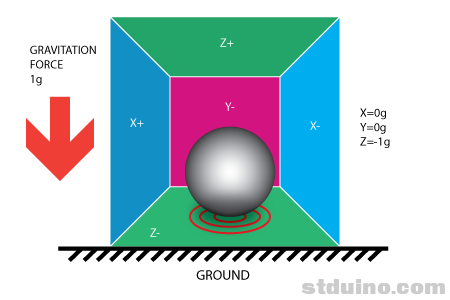
實(shí)際上,當(dāng)模塊靜止時(shí)��, Z 軸方向上一直受到小球的擠壓(由于重力作用)�����,也應(yīng)此����,該模塊無法獲得物體在Z 軸上的旋轉(zhuǎn)角。如果必須要獲得絕對(duì)的旋轉(zhuǎn)角���,那么可以選擇性MPU9250這個(gè)九軸運(yùn)動(dòng)跟蹤芯片�。
MPU6050加速度計(jì)03.png (22.91 KB, 下載次數(shù): 76)
下載附件
2020-8-17 18:50 上傳
實(shí)驗(yàn)?zāi)康模?/strong>在本例中���,我們將學(xué)習(xí)如何將傳感器與 Stduino UNO一起使用�,利用陀螺儀模塊監(jiān)測(cè)物體移動(dòng)方向��。
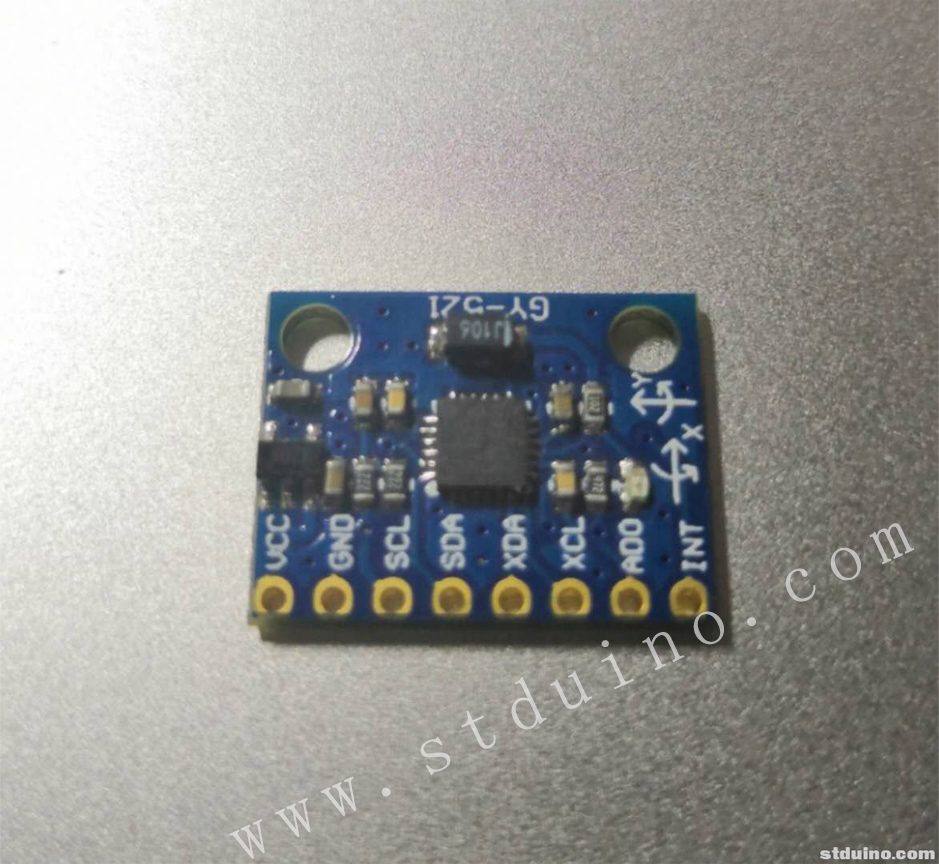
器材:Stduino UNO / Nano; 杜邦線����; MPU6050陀螺模塊
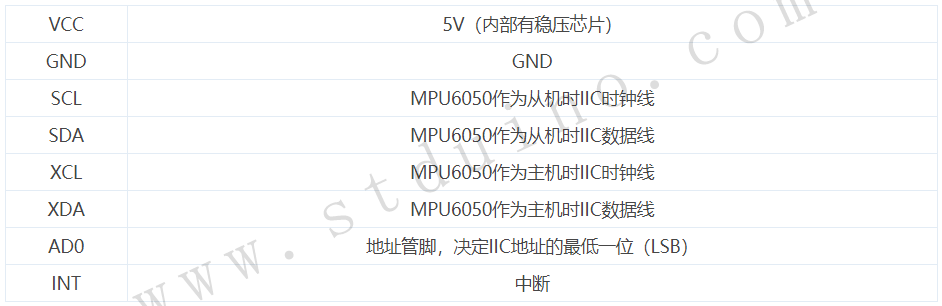
電路連接: MPU6050-> Stduino UNO /納米
VCC-> 5V
GND->GND
SCL-> D9
SDA-> D10
XCL
XDA
AD0->接地
INT-> D2
重點(diǎn)說明:
電路連接.png (24.06 KB, 下載次數(shù): 76)
下載附件
2020-8-17 18:54 上傳
代碼展示:
#include<Wire.h>
const int MPU6050_addr=0x68;
int16_t AccX,AccY,AccZ,Temp,GyroX,GyroY,GyroZ;
void setup(){
//D9 SCL
//D10 SDA
//5V
//GND
Wire.begin();
Wire.beginTransmission(MPU6050_addr);
Wire.write(0x6B);
Wire.write(0);
Wire.endTransmission(true);
Serial.begin(9600);
}
void loop(){
Wire.beginTransmission(MPU6050_addr);
Wire.write(0x3B);
Wire.endTransmission(false);
Wire.requestFrom(MPU6050_addr,14,true);//按順序讀取數(shù)據(jù)
AccX=Wire.read()<<8|Wire.read();//X軸方向的加速度分量
AccY=Wire.read()<<8|Wire.read();//Y軸方向的加速度分量
AccZ=Wire.read()<<8|Wire.read();//Z軸方向的加速度分量
Temp=Wire.read()<<8|Wire.read();
GyroX=Wire.read()<<8|Wire.read();//繞X軸旋轉(zhuǎn)的角速度GYR_X
GyroY=Wire.read()<<8|Wire.read();//繞Y軸旋轉(zhuǎn)的角速度GYR_Y
GyroZ=Wire.read()<<8|Wire.read();//繞Z軸旋轉(zhuǎn)的角速度GYR_Z
Serial.print("AccX = "); Serial.print(AccX);
Serial.print(" || AccY = "); Serial.print(AccY);
Serial.print(" || AccZ = "); Serial.print(AccZ);
Serial.print(" || Temp = "); Serial.print(Temp/340.00+36.53);
Serial.print(" || GyroX = "); Serial.print(GyroX);
Serial.print(" || GyroY = "); Serial.print(GyroY);
Serial.print(" || GyroZ = "); Serial.println(GyroZ);
delay(100);
}
實(shí)驗(yàn)效果:窗口監(jiān)視器����,如下圖所示:

29-陀螺儀模塊.png (24.6 KB, 下載次數(shù): 79)
下載附件
2020-8-17 18:56 上傳
Stduino IDE是一款面向32位處理器快速入門學(xué)習(xí)的集成開發(fā)平臺(tái)��,目前已經(jīng)支持Arduino_Core_STM32框架�,集聚快捷、高效����、免費(fèi)、開源����、易得于一身,軟件還集成了GDB調(diào)試功能����。IDE當(dāng)前支持的功能有:
GDB調(diào)試
封裝庫(kù)下載安裝
代碼自動(dòng)補(bǔ)全提示
中英文模式
UTF-8\GBK編碼格式
代碼快速格式化
SWD\串口程序下載&調(diào)試(已驗(yàn)證)
DFU程序下載方式(待驗(yàn)證)
USB HID程序下載方式(待驗(yàn)證)
maple DFU程序下載方式(待驗(yàn)證)
maple DFU2程序下載方式(待驗(yàn)證)
MassStorage程序下載方式(待驗(yàn)證)
更多功能細(xì)節(jié)請(qǐng)點(diǎn)擊圖片上水印顯示的網(wǎng)址進(jìn)行了解
已經(jīng)支持的芯片&板型列表:
Stduino UNO&Nano
Nucleo 144 boards
Nucleo 64 boards
Nucleo 32 boards
Discovery boards
Eval boards
STM32MP1 series coprocessor boards
Generic STM32F0 boards
Generic STM32F1 boards
Generic STM32F3 boards
Generic STM32F4 boards
Generic STM32H7 boards
Generic STM32L0 boards
3D printer boards
LoRa boards
Electronic Speed Controller boards
Generic flight controllers
Garatronics boards
Midatronics boards
更多功能集成正在進(jìn)行中~