標(biāo)題: 多級皮帶運輸機控制編程實戰(zhàn)【PLC學(xué)習(xí)筆記】 [打印本頁]
作者: hujia 時間: 2015-5-28 01:28
標(biāo)題: 多級皮帶運輸機控制編程實戰(zhàn)【PLC學(xué)習(xí)筆記】
第三課時【編程實戰(zhàn)】
【例】多級皮帶運輸機控制
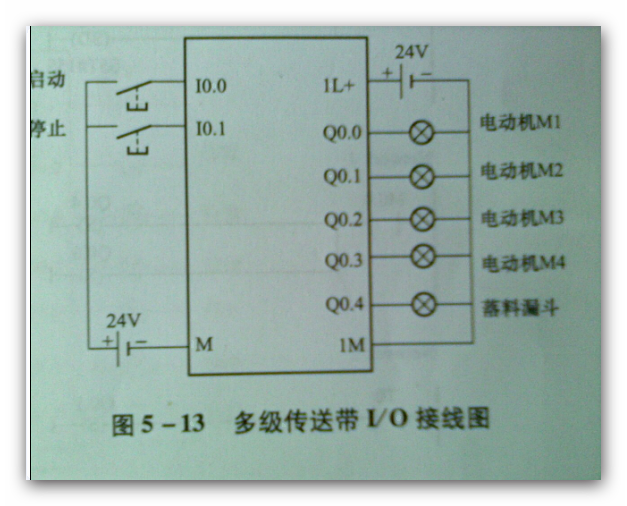
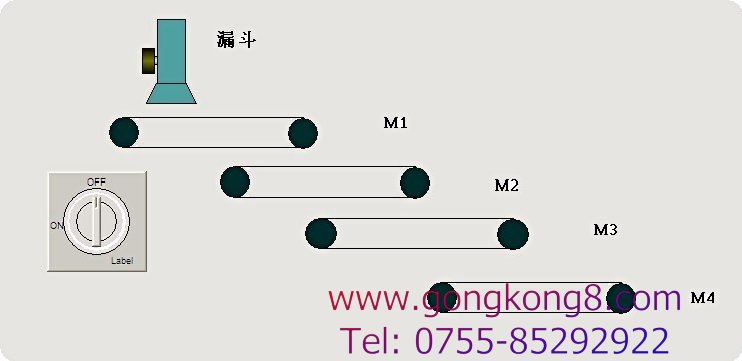
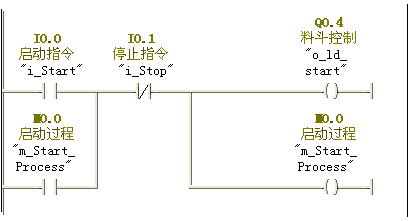
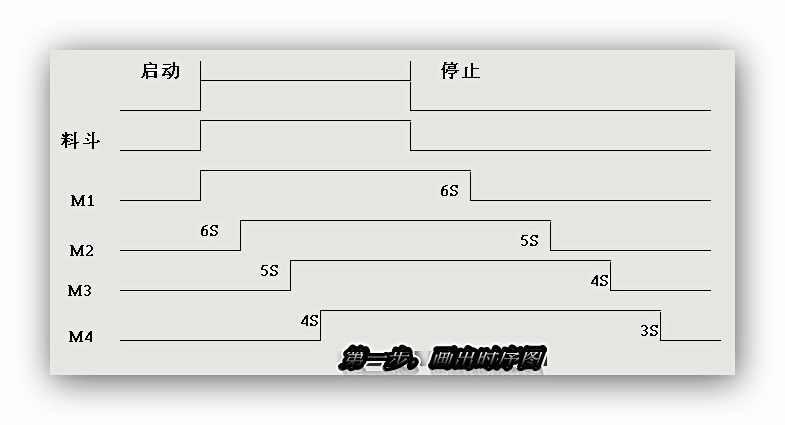
如圖所示是一個四級傳送帶系統(tǒng)示意圖���。整個系統(tǒng)有四臺電動機M1�����、M2����、M3����、M4,落料漏斗Y0由一 閥控制�。控制要求如下:
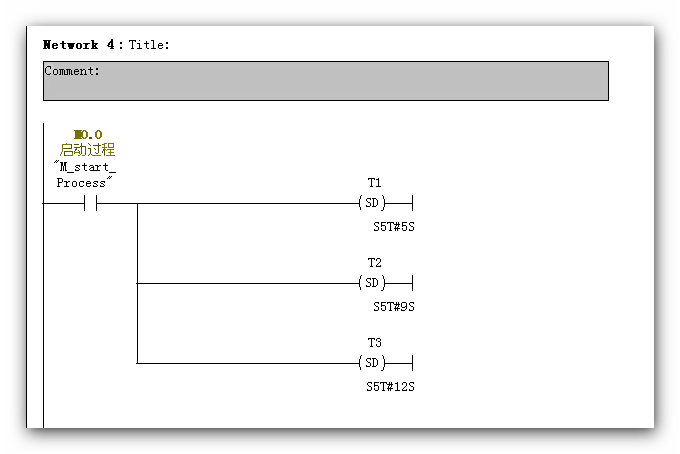
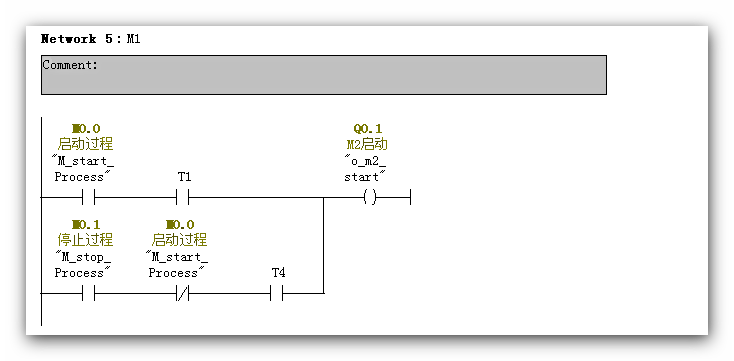
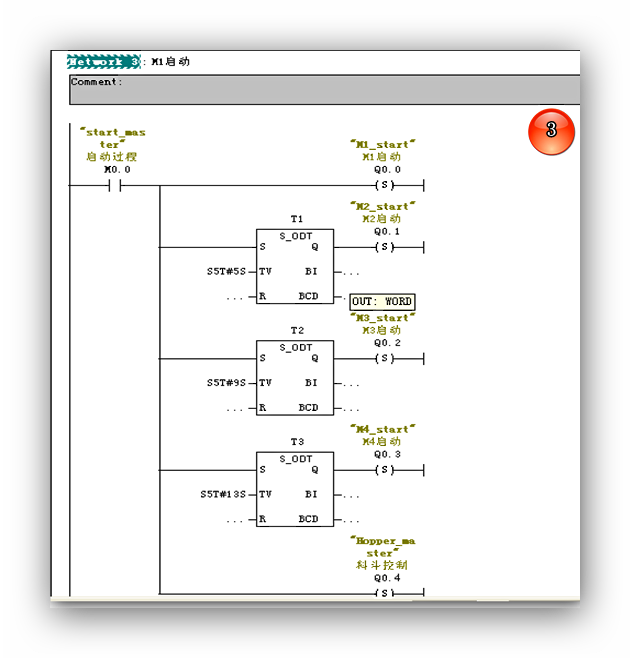
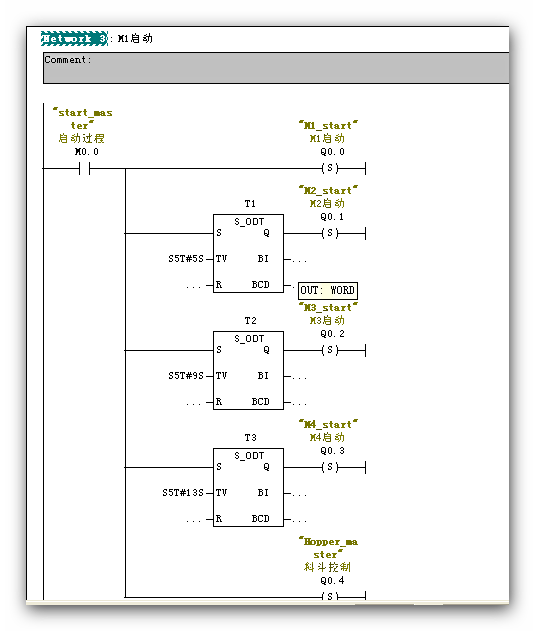
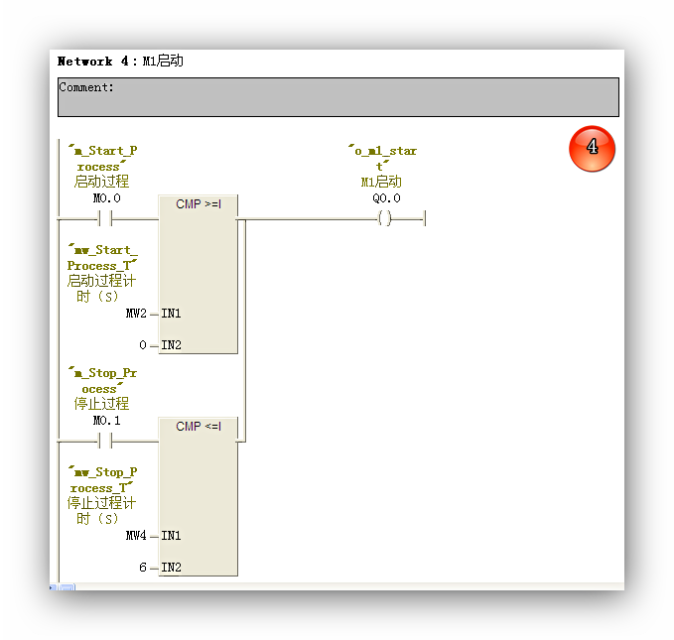
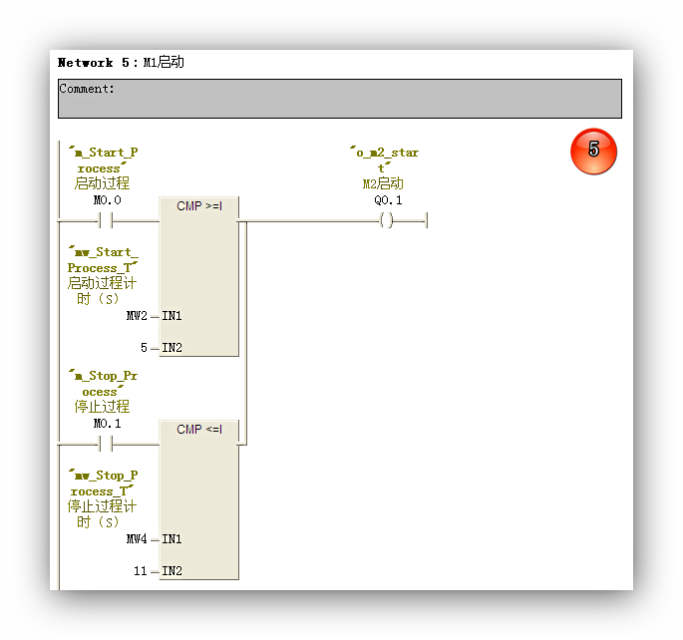
<1>落料漏斗啟動后���,傳送帶M1應(yīng)馬上啟動�,經(jīng)6s后須啟動傳送帶M2����。
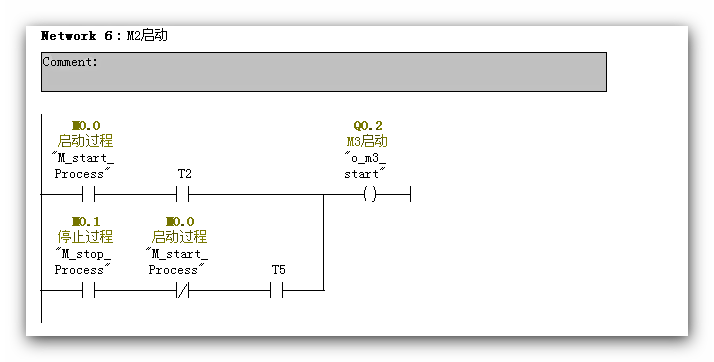
<2>傳送帶M2啟動后5S后應(yīng)啟動傳送帶M3
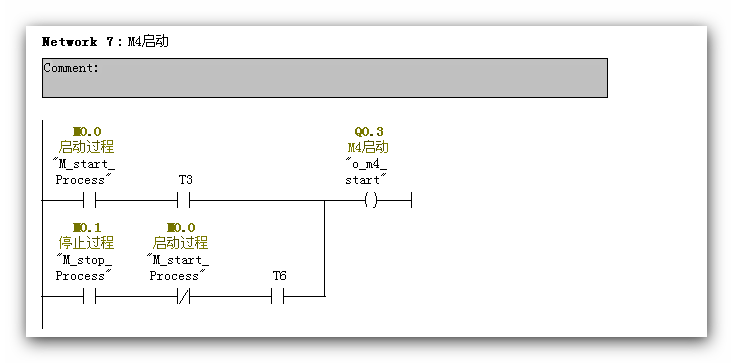
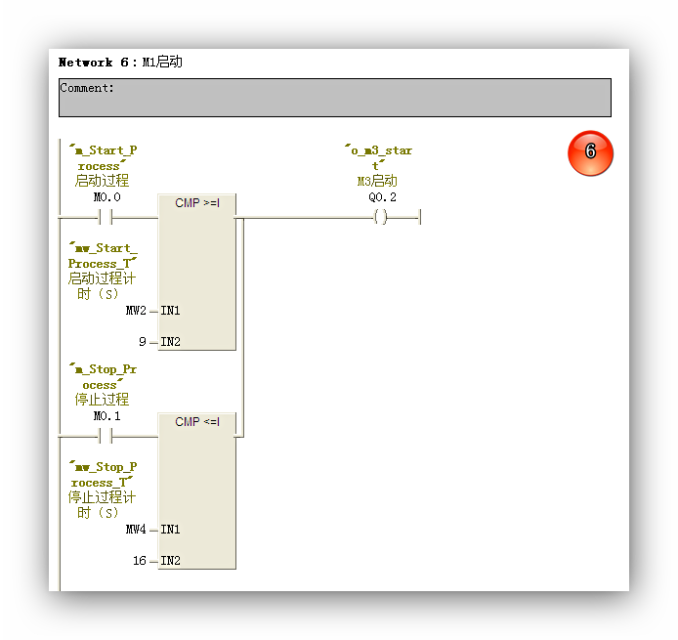
<3>傳送帶M3啟動后4s后應(yīng)啟動傳送帶M4
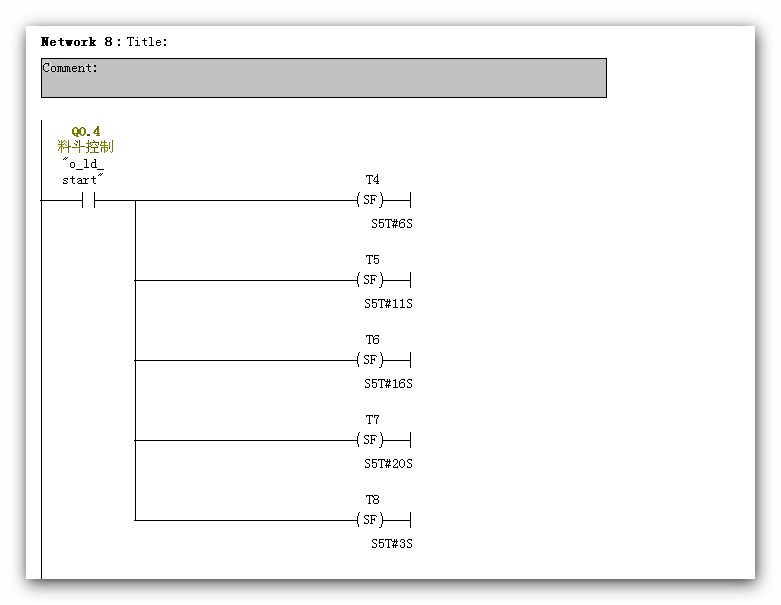
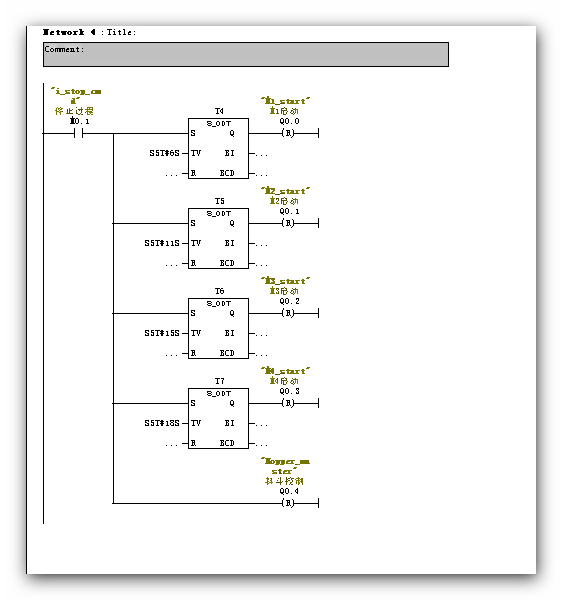
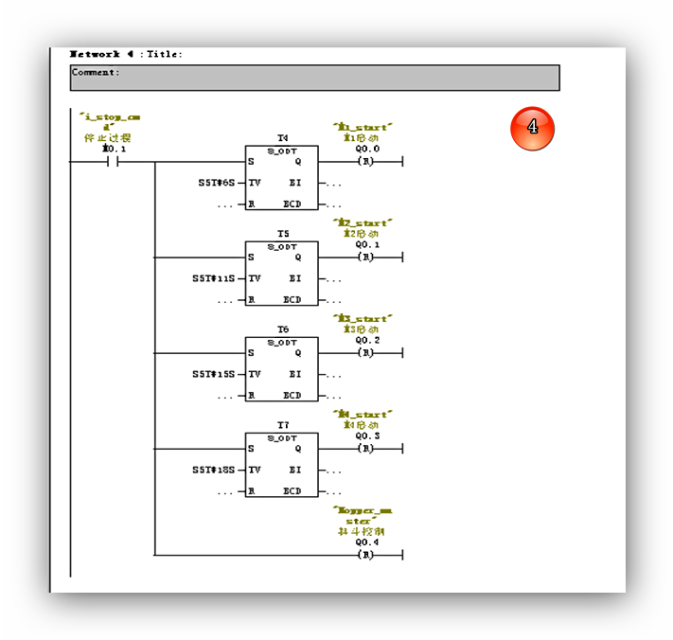
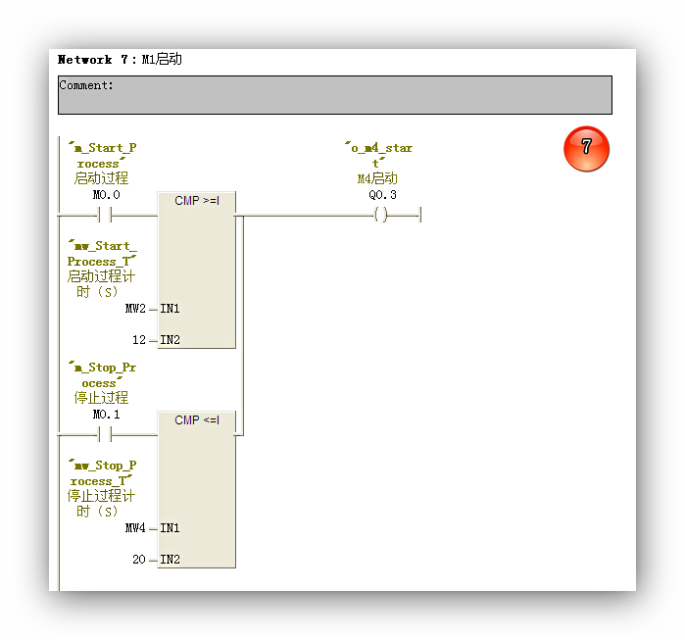
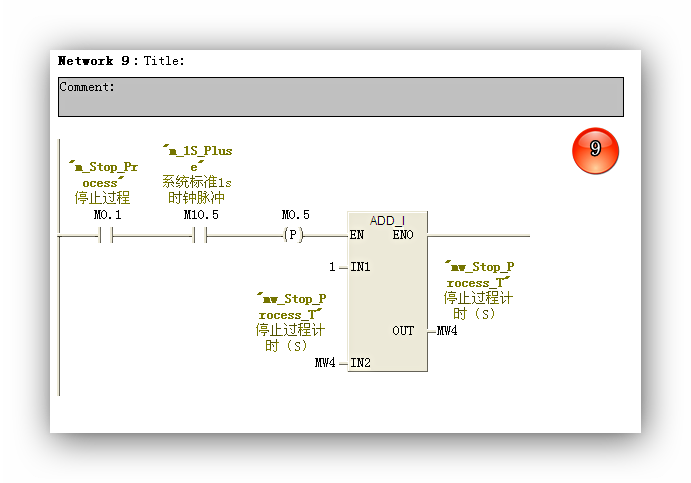
<4>落料停止后,應(yīng)根據(jù)所需傳送時間的差別���,分別隔3s�、4s����、5s、6s將��、M1����、M2、M3���、M4四臺電動機停車��。
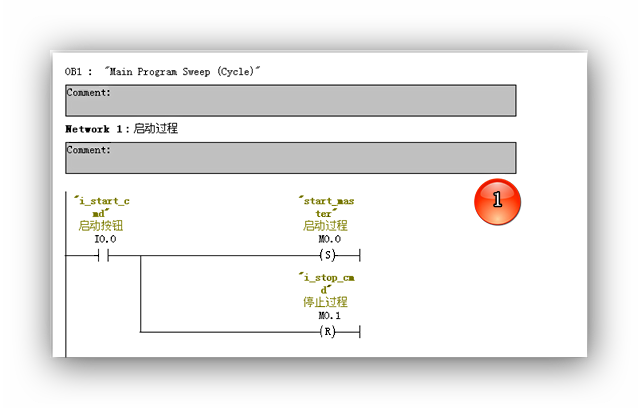
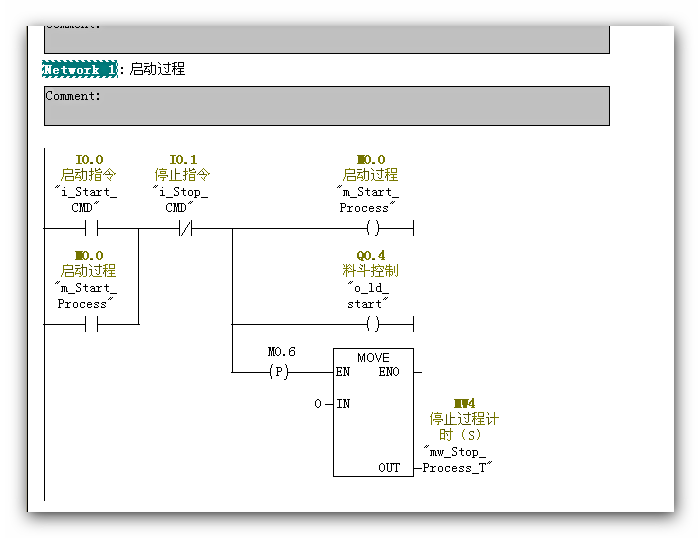
<5>其中I0.0為啟動按鈕�,I0.1為停止按鈕���。Q0.4控制落料�����,Q0.0~Q0.3分別控制4臺電動機����。
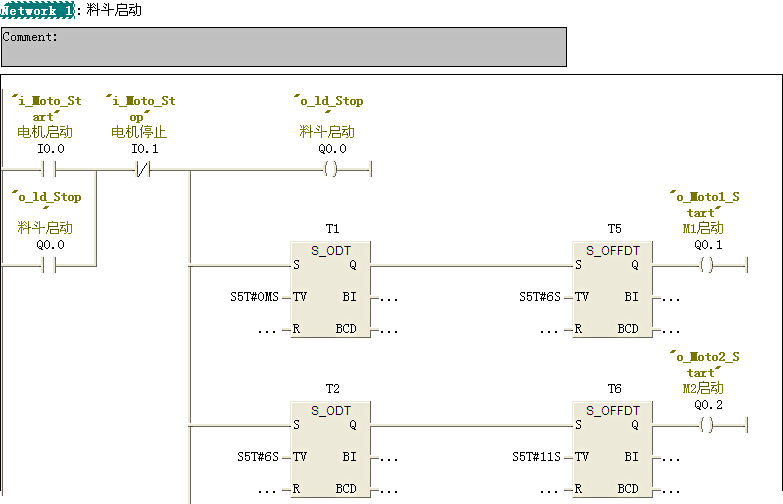
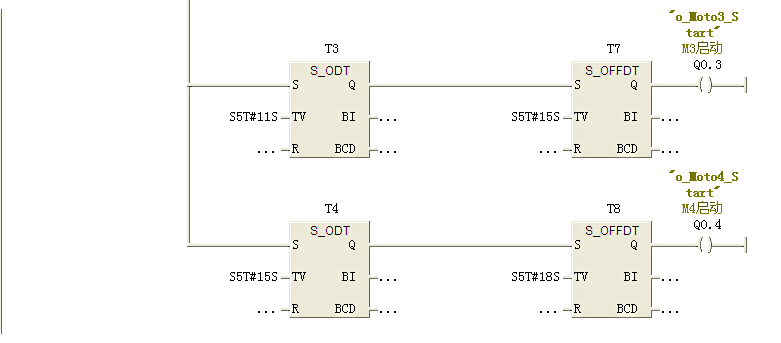
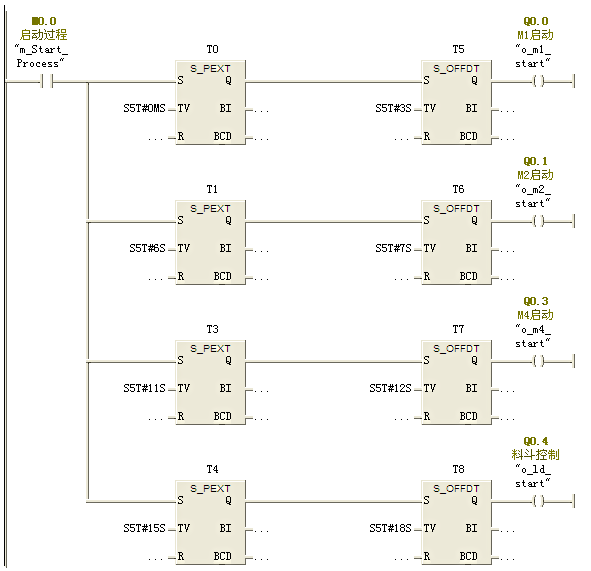
【編程實例一】:
編程思想:用計時器來控制電機的啟停�。
【編程實例二】:
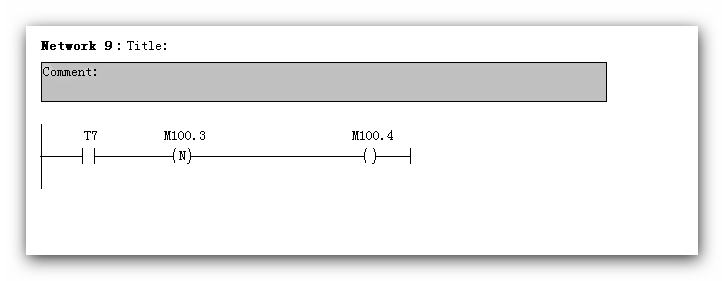
編程思想:用時間繼電器和置位與復(fù)位指令來實現(xiàn)電機的啟停����。
【編程實例三】:
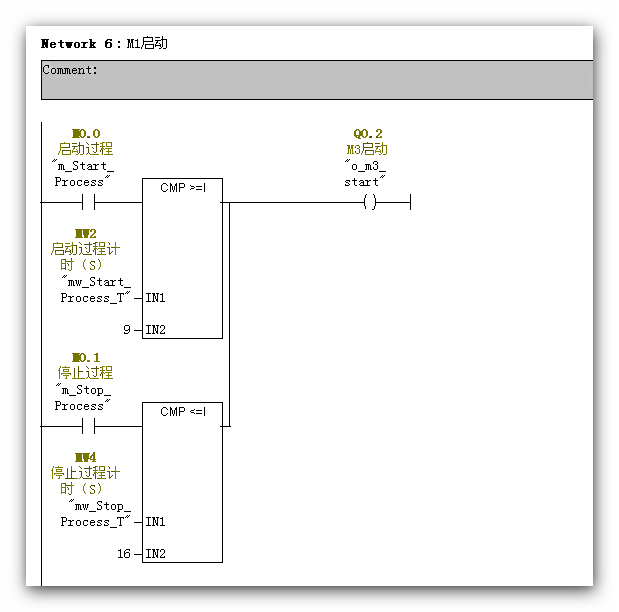
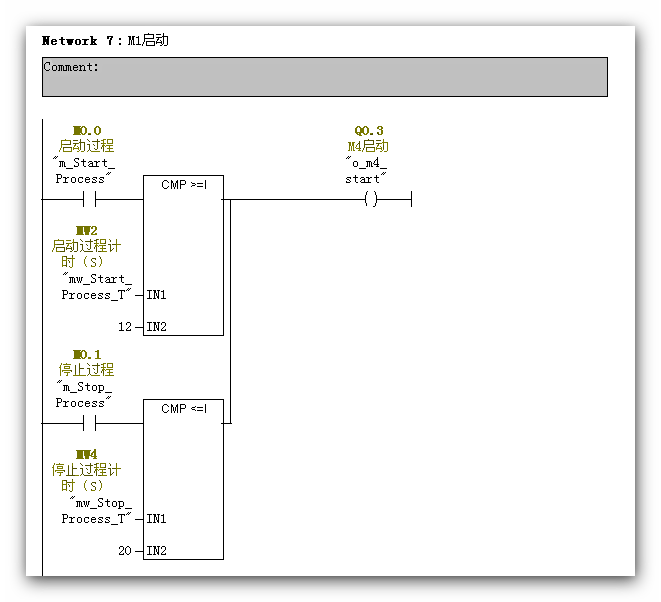
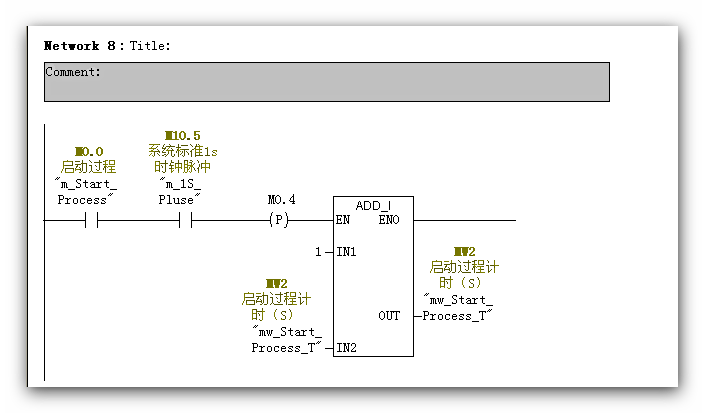
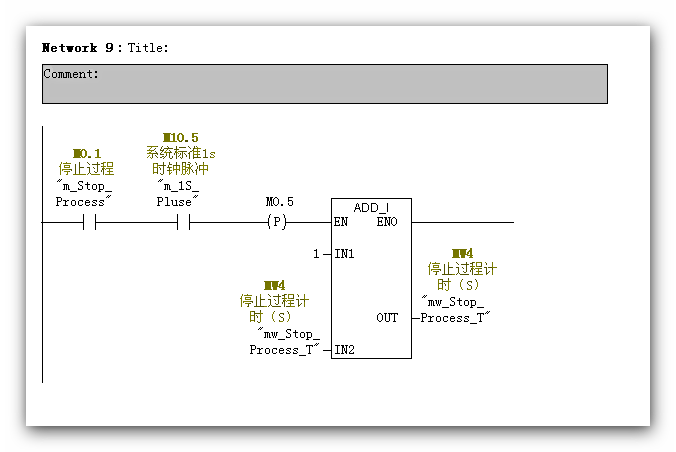
編程思想:用CPU時鐘存儲器作為定時器和比較指令來控制電機的啟停���。
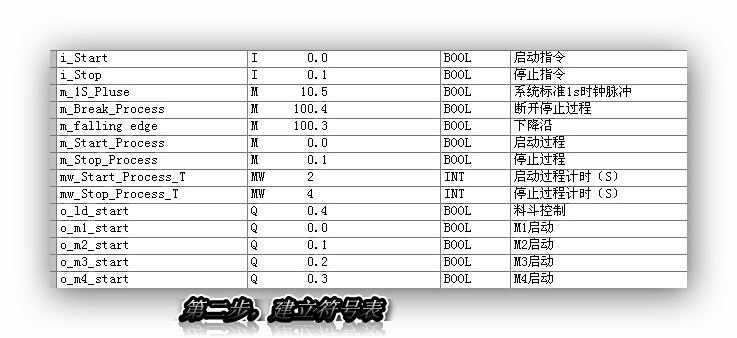
第三步 用CPU時鐘存儲器作為定時器和比較指令來控制電機的啟停
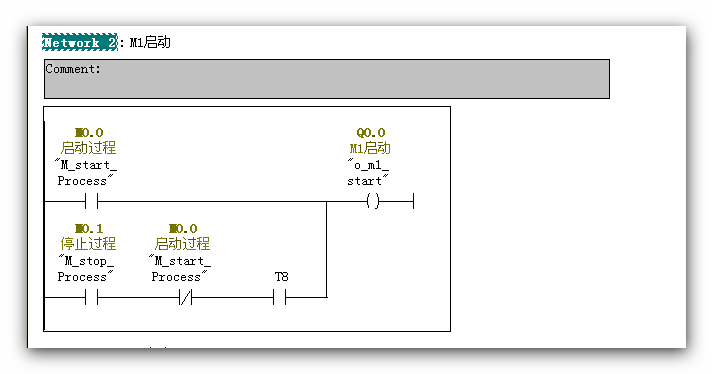
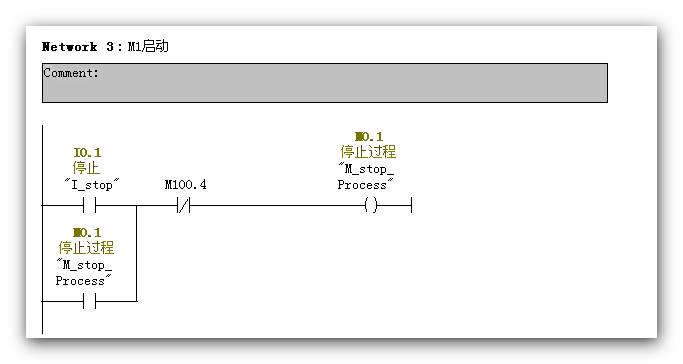
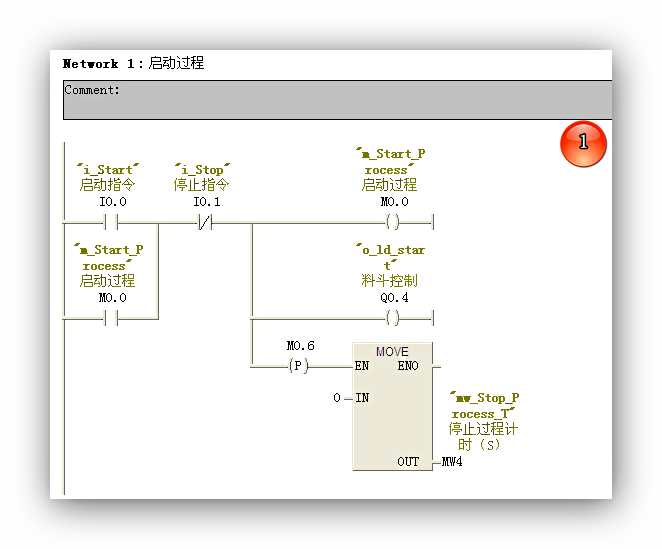
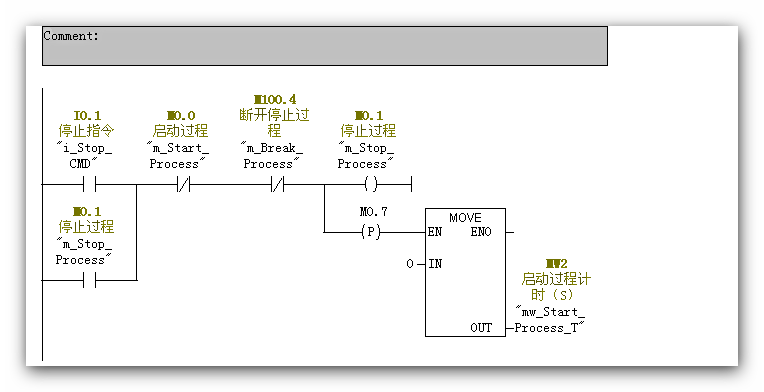
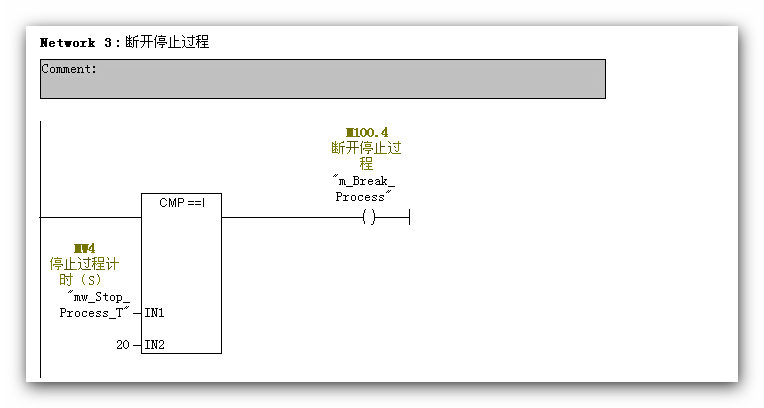
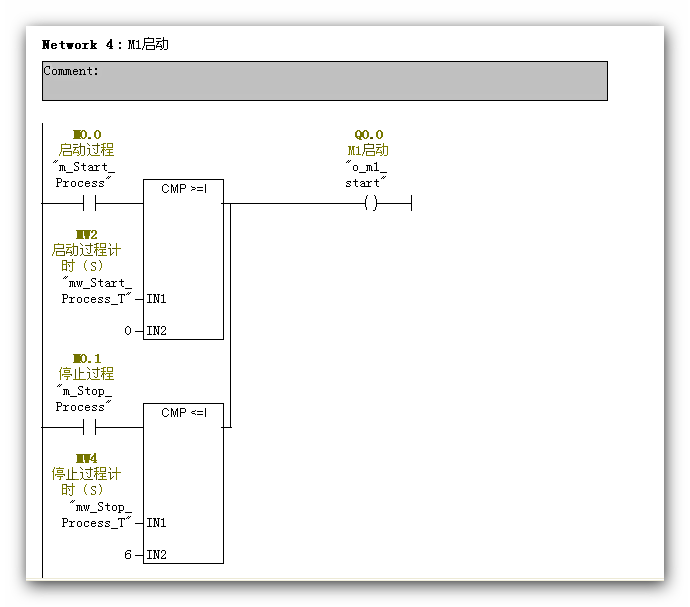
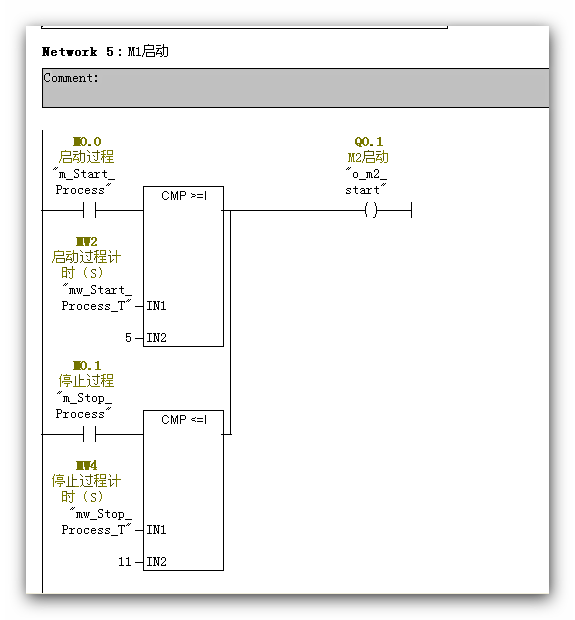
【編程實例四】
編程思想:用MOVE�����,CMP指令����,CPU時鐘儲存器�����,由啟動和停止過程共同來實現(xiàn)電機的啟停��。
| 歡迎光臨 (http://www.torrancerestoration.com/bbs/) |
Powered by Discuz! X3.1 |