�����������ã��tɫ����+5V��늣���ɫ���ǵؾ������ɫ������̖��
2. �乤��ԭ���ǣ�
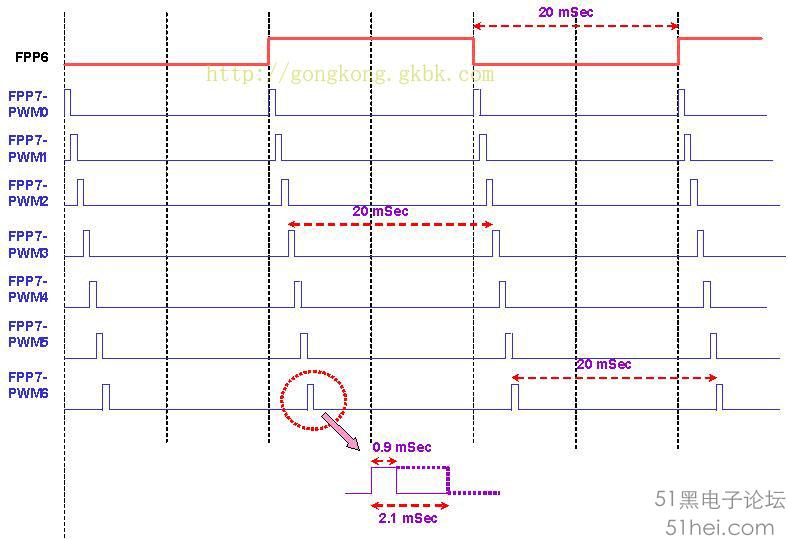
������̖�ɽ��ՙC��ͨ���M����̖�{��оƬ���@��ֱ��ƫ��늉��������Ȳ���һ�������·��������a�����ڞ�20ms������Ȟ�1.5ms�Ļ�����̖������@�õ�ֱ��ƫ��늉��c�λ����늉����^����@��늉���ݔ������������������늉������ؓݔ����늙C��оƬ�Q��늙C�������D����늙C�D��һ���r���ͨ�^���p���X݆�����λ�����D��ʹ��늉����0�������늙Cֹͣ�D�������Ȼ�҂����Բ���ȥ�˽����ľ��w����ԭ����֪�����Ŀ���ԭ���͉��������������҂�ʹ�þ��w��һ�ӣ�֪���������������_�P�ܻ�Ŵ�ܾ���������������ڹ܃ȵ���Ӿ��w��ô�����ǿ�����ȫ����ȥ���]���������
3. ��C�Ŀ��ƣ�
��C�Ŀ���һ����Ҫһ��20ms���ҵĕr���}�_��ԓ�}�_�ĸ��ƽ����һ���0.5ms~2.5ms�����ȵĽǶȿ����}�_�����������180�ȽǶ��ŷ��������������ô�����Ŀ����Pϵ���@�ӵģ�
0.5ms--------------0������
1.0ms------------45��������
1.5ms------------90���������
2.0ms-----------135�������
2.5ms-----------180�����
Ո��������������:
�@ֻ��һ�N������ֵ����������w�ą���������Ո��Ҋ��C�ļ��g������
С�Ͷ�C�Ĺ���늉�һ���4.8V��6V��������D��Ҳ���Ǻܿ�����һ���0.22/60�Ȼ�0.18/60��������Լ�������ĽǶȿ����}�_�Č���̫��r����C���ܷ������^����������Ҫ�����ٵķ���������Ҫ���ߵ��D�����������
Ҫ���_�Ŀ��ƶ�C��������䌍�]����ô���������ܶ��C��λ�õȼ���1024������ô��������C����Ч�Ƕȷ�����180�ȵ�Ԓ������ƵĽǶȾ����ǿ����_��180/1024�ȼs0.18�����������ĕr�g�Ͽ��䌍Ҫ����}�����ƾ��Ȟ�2000/1024us�s2us����������˂���C�������B���ƾ��Ȟ�1�ȶ��_������Ԓ������߀������C�ڰl(f��)������������@�N��r�����ֻҪ��C��늉��]�ж��ӣ��Ƕ��ӵľ�����Ŀ����}�_������������@���}�_��ʲô�����������������Ȼ�����x�õ��}�_�l(f��)�������P��������һЩǰ݅ϲ�g��555���{��C�����}�_�������ֻ�ǿ��Ǝׂ��cλ���ŷ������ǿ����@ô����������Զ��Îׂ��_�P��Щ�������{ռ�ձ��������@ô�����Ά���������ԓ���������{ԇ��ԓ�Ƿdz��韩�����\��Ҳ��һ���ɿ�������䌍��Ҫ߀�����ǂ��������Ƭ�C�@�|��������ѽ����������������
ʹ�Â��y��Ƭ�C���ƶ�C�ķ���Ҳ�кܶ��������������ö��r�����Д�ķ�ʽ����ɿ��Ƶ������@�ӵķ�ʽ����1����C߀���ஔ��Ч��������������S����C���������ӣ�Ҳ�S���������͛]����ô������ҿ����_���s2����}�����ƾ���������� �fAVRҲ�п���32����C��ԇ������������^�����ܲ����_��2�����߀��Ҫ̩�˲�֪��������䌍�yԇ�����ܺ����������ֻ��Ҫ���������̖�cʾ�����B������Ȼ��ԇ��ݔ���Ķ�C������̖��2��Č����f������
��ʲôFPPA�Ϳ��Ժܷ���،��}���ľ��Ⱦ��_�ؿ�����2������2��һ������������Ҫ߀�� delay memory�@�ӵľ��Є�(chu��ng)���Ե�ָ��l(f��)�]�˹�Ч�������ԓָ����ӕr�r�g�锵����Ԫ�е���������ֵ��1��ָ�����ڣ�����0��������Ԕ��Ո��Ҋdelayָ��ʹ��ע����헣������8λ�Ĕ����惦��Ԫ������memory�еĔ����飨0��255�������ӛ��ǰ�������^�������C�ĽǶȼ���һ���1024��������ֻ��һ���惦���g���惦�ӕr��������߀�����õ����������҂����Բ���2���ȴ��Ԫ����Ŷ�C�ĽǶ��ŷ������ˡ������@��һ������҂����Բ����@�ӵ�ܛ���Y���ˣ�
��C�ӵđ��È��ϣ�
1. �ߙn�b�ط���܇,���ٵð������D�����D����,�߾��ȵĽǶȿ���,��Ȼ�o�����挍���{܇�w�.
2. �����ɶșC�����OӋ,��ʲô�ձ����OӋ�ęC���˿������fRMB�ij���,
�������OӋ��һЩ����ǧ�KҲ�u����ȥ��,߀��һ��Ʒ�|�Ć��}.
3. ��·�ŷ���ģ����,늄��b���w�C,�̈́��b���w�C,����ģ�͵�