��(bi��o)�}: �P(gu��n)��51��Ƭ�C(j��)���ƶ�C(j��)���p��늙C(j��)��ƣ���Ԕ�� [��ӡ���(y��)]
����: 51�ںں� �r(sh��)�g: 2016-2-23 22:25
��(bi��o)�}: �P(gu��n)��51��Ƭ�C(j��)���ƶ�C(j��)���p��늙C(j��)��ƣ���Ԕ��
�P(gu��n)�ڶ�C(j��)���Ŀǰ�W(w��ng)�j(lu��)�Ϻ͕�(sh��)������������y�ҵ�Ԕ��(x��)���е��Y�ϣ��������������ǹ�Ӌ(j��)������Ϲ������Ҫ���Ҿͺ���-
-���������������ROBOTCUP���\(y��n)�C(j��)���˵��^(gu��)����������� (t��ng)ȡ�W(xu��)�L(zh��ng)�ġ����h�������ö�C(j��)����C(j��)���˵��(q��)��(d��ng)�������֮��(d��ng)�r(sh��)̫���p������ʹ��90ϵ��51��Ƭ�C(j��)�������һ��(g��)��C(j��)����3��(g��)�£����](m��i)�а����A(y��)���������ӱ�ِ���@��(g��)Ҳ��IJ����l(shu��)�����߂�(g��)��·�����Ҳ����(hu��)��(du��)��C(j��)��51��Ƭ�C(j��)�����Ĵ�ش���-
-������������������������ЌW(xu��)�܌W(xu��)�������Ҫ���Ժ���֮ı�ِ�����ڏ������P(gu��n)�Ĺ�������ô�ú��о��¶�C(j��)�Ŀ���������(du��)����ʮ���Ў����ģ��o(w��)Փ�nj�(du��)�ڶ�C(j��)���Ƶ�ԭ��߀�nj�(du��)����оƬ�����ⶼ���Ў����������P(gu��n)�ڶ�C(j��)�Ŀ��������Ҳ�ԃ�^(gu��)���P(gu��n)���Y������ҲՈ(q��ng)���^(gu��)�ҵČ�(d��o)������������ǽY(ji��)�����ܲ��M�⣬��C(j��)�y�D(zhu��n)��������D(zhu��n)�ٿ��Ʋ����_��������F(xi��n)�^(gu��)���N��(w��n)�}����K��������ҲӲ��ͨ�^(gu��)���X(qi��n)���ҕr(sh��)�g��20�Kһ��(g��)��PWM�{(di��o)������֪�����˶���-
-���@��(g��)�������IJ����ҵ���������������������90�Kһ��(g��)��C(j��)������60�Kһ��(g��)�ĺ�ģPWM��C(j��)�{(di��o)����߀�����ˎװىK�M(j��n)ȥ�ģ�������С���ͨ�^(gu��)��(sh��)�(y��n)����������(f��)�y(c��)ԇ�õ��ĽY(ji��)�������@���������(l��i)���ϣ���������W(xu��)�܌W(xu��)�á�
���ȣ���C(j��)����ʲô�������C(j��)�������D(zhu��n)�ĽǶȣ����Է֞�180���360���B�m(x��)���D(zhu��n)��C(j��)����180���C(j��)������˼�x������ֻ�����D(zhu��n)180��Ķ�C(j��)�����҂�����ͨ�^(gu��)һ���ķ�������������_�Ŀ��ƶ�C(j��)���D(zhu��n)�ĽǶ���������ˣ�����Ŀǰ���|���ı�ِ��(l��i)�������180���C(j��)���p��C(j��)�����Լ��w˼������(j��ng)��܇���D(zhu��n)����ʹ�õĺܶ���������p��C(j��)���˾���ģ������·�ęC(j��)��������ͨ�^(gu��)����180���C(j��)�D(zhu��n)��(d��ng)�ĽǶ��������ָ���Ą�(d��ng)�������w˼�����D(zhu��n)���������܇ʹ�÷���P(p��n)�D(zhu��n)�������C(j��)������P(p��n)�����á�360���B�m(x��)���D(zhu��n)��C(j��)����������ͨ�^(gu��)һ���ֶ����������ƶ�C(j��)�����D(zhu��n)������ٶȣ���������Ҳ��������С܇�͙C(j��)���˵��(q��)��(d��ng)������@����Ҫ�f(shu��)���������180���C(j��)�ǟo(w��)���{(di��o)�ٵģ������f(shu��)��������ʼ�K��(hu��)������ٶȣ��������O(sh��)���ĽǶ����D(zhu��n)������ֱ�����D(zhu��n)��Ŀ��(bi��o)�Ƕ�ֹͣ�������360���C(j��)�ǟo(w��)���������D(zhu��n)�ĽǶȵģ�ֻ���Կ����D(zhu��n)��ͣ�������D(zhu��n)�ͷ��D(zhu��n)�Լ��D(zhu��n)������
�����Ƕ�C(j��)��
���b��180���C(j��)���p��C(j��)���ˣ�
���b��360���C(j��)�İ��\(y��n)�C(j��)���ˣ�
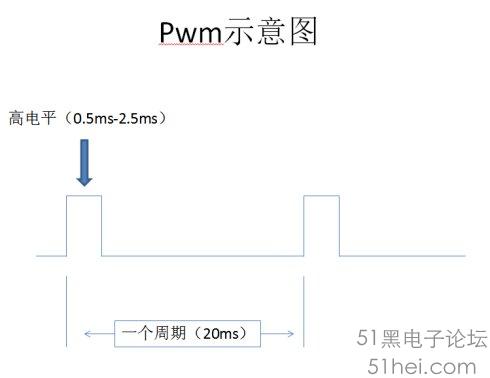
��һ��������������ᵽ����ͨ�^(gu��)һ���ķ����������ƶ�C(j��)����������ʲô����?PWM!��Ҳ����ʲô�Ͻ�����������Ҳ�ϲ�g�f(shu��)̫��������Փ�������@�ֻ��Ҫ֪������Ҫ���ƶ�C(j��)�������҂�Ҫ��Ƭ�C(j��)ݔ��һ��(g��)���ڞ�20ms-30ms����������ƽ��0.5ms-2.5ms����̖(h��o)���������
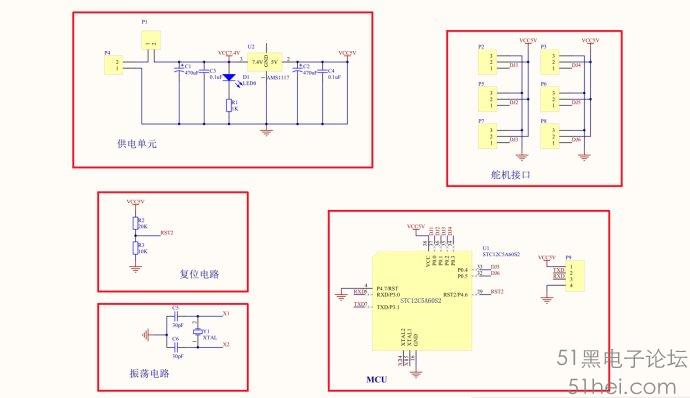
�P(gu��n)��Ӳ���ϵ��O(sh��)Ӌ(j��)���o(w��)���DZ��C��늵ķ�(w��n)�����A(y��)����PWM�Ľӿ������������ұ���Ҳ������Ӳ�����������@��Ͳ�Ԕ��(x��)�f(shu��)���ˣ��@�︽��һ���D�������dȤ��С�������о�һ�����������(du��)Ӳ�����������Ć�(w��n)�}�������Ҳ����˽��(li��n)ϵ���������҂��M��Ӳ����С��������߀�Ǻ܅����ġ�
���@�(du��)360���C(j��)���ͨ�^(gu��)51��Ƭ�C(j��)�ij����M(j��n)�п�����Ԕ��(x��)���f(shu��)����������(du��)��360���C(j��)���ԣ�PWM���ƽ��0.5-1.5ms�����D(zhu��n)�^(q��)�g������1.5-2.5ms�鷴�D(zhu��n)�^(q��)�g��1.5ms���C(j��)�x܇�c(di��n)��������(sh��)�H�y(c��)ԇ�^(gu��)���У���ʹ�õĶ�C(j��)�������ƽ0.5ms-1.37ms��������ٶ����D(zhu��n)��������D(zhu��n)���{(di��o)�ٸ��ƽ�^(q��)�g��1.37ms-1.47ms�����ƽԽ����1.5ms�������C(j��)�D(zhu��n)��Խ���������ƽ1.53ms-2.5ms��������ٶȷ��D(zhu��n)����������D(zhu��n)�{(di��o)�ٸ��ƽ�^(q��)�g�飺1.53-1.63ms�����ƽԽ����1.5ms����C(j��)�D(zhu��n)��Խ���������x܇���ƽ�^(q��)�g�飺1.47-1.53ms�������Dz��Ǹ��X(ju��)�ܺ�(ji��n)���أ� (t��ng)����(l��i)������ͦ��(ji��n)�ε�����������Л](m��i)�����^(gu��)���ʹ��51��Ƭ�C(j��)�a(ch��n)���҂���Ҫ��PWM����������С����(hu��)�f(shu��)�������ö��r(sh��)����������������(d��ng)Ȼ�����һ�_(k��i)ʼҲ���@ô��ģ����������@�γ���
unsigned int
i=1;
int n;
void
ste360(n){
TMOD=0X01;
TL0=0XF6; //
0.01ms
TH0=0XFF;
TR0=1;
EA=1;
ET0=1;
P1=0X00;
while(1);
}
void _pwm () interrupt 1
{
TH0=0xff; //
0.01ms
TL0=0xF6;
i++;
if(i<=n){
P1=0XFF; //
1.37<<1.47-1.54<<1.63
} else
P1=0x00;
if(i>=2000){
i=1;
}
}
������(l��i)�������](m��i)��ʲô��(w��n)�}������ste360(n)�@��(g��)����(sh��)��n�Ϳ��Կ���pwm���ƽ�ĕr(sh��)�g���������O(sh��)�����r(sh��)����ÿ0.01ms�M(j��n)��һ���Д࣬��������Ҫ��õ�1.5ms���ƽ��������Dz���n�(xi��)150���������������Ƿģ����ھ��w�Y(ji��)����ô����������@��Ͳ��؈D�������](m��i)���ڌW(xu��)У�](m��i)����ʾ��������֮�����ư�����������@����V���������mȻ����߉�Ǜ](m��i)�І�(w��n)�}�ģ�Ӌ(j��)�����(l��i)�_��(sh��)��1.5ms��������ǽY(ji��)�������Ǹ��ƽ��3ms+��������ʲô����@��(g��)��(w��n)�}��������ͦ�ã��Һ͌W(xu��)�L(zh��ng)ҲӑՓ�^(gu��)������f(shu��)�����g�^(gu��)������������(hu��)���҂���(xi��)��c�ļ�������g�ɅR���ļ���Ȼ���D(zhu��n)�əC(j��)���Z(y��)����������@��(g��)�^(gu��)���п��ܕ�(hu��)���`������X(ju��)������������������`�����������������@�ӷ���(f��)���M(j��n)���Д����������(x��)С���`���(hu��)���o(w��)�ķŴ����ͬ����ʹ��c��stm32��pwm�ľ��ȸߵ��x�V�����������������ʹ��51��Ƭ�C(j��)��8λ���r(sh��)����(l��i)���ƶ�C(j��)�����ҿ���(l��i)��������ȫ�����еģ������|(zh��)���ҵ���������������ij��������Ҍ�(xi��)�ı��ඨ�r(sh��)������pwmݔ�����������ڵ�һ��(g��)��������ų���(l��i)���⺆(ji��n)�������������ں��L(zh��ng)һ�Εr(sh��)�g��O����(y��u)�����a��������Lԇ�^(gu��)���N˼·������ǽY(ji��)��ֻ���f(shu��)�������������h(yu��n)�h(yu��n)�_(d��)�������ƶ�C(j��)��Ҫ����������в�������С���������Ҳ�����Լ���(xi��)�c(di��n)С������ʾ�����Ͽ�������������ö��r(sh��)��������ô�k������С����f(shu��)������stc12ϵ�е�51��Ƭ�C(j��)���Ԏ�8λpwmģ�K����Dz��ǿ�����12ϵ�еĆ�Ƭ�C(j��)��(sh��)�F(xi��n)��������
#include
//-----------------------------
// 7
6 5 4 | 3 2 1
0
sfr CCON=0xD8;//CF CR -
- | - - CCF1 CCF0
//-----------------------------
//CF:PCAӋ(j��)��(sh��)��������(bi��o)־.Ӌ(j��)��(sh��)ֵ���D(zhu��n)�r(sh��)��Ӳ����λ���
//CR:PCAӋ(j��)��(sh��)����\(y��n)�п���λ��
//CCF1:PCAģ�K1�Д���(bi��o)־��������(d��ng)���F(xi��n)ƥ����߲��@�r(sh��)��Ӳ����λ��
//CCF0:PCAģ�K0�Д���(bi��o)־�������(d��ng)���F(xi��n)ƥ����߲��@�r(sh��)��Ӳ����λ�����
/
sfr
CCAP0L=0xEA;//PCAģ�K0�IJ�/���^�Ĵ�����8λ
sfr
CCAP0H=0xFA;//PCAģ�K0�IJ�/���^�Ĵ�����8λ
sfr
CCAPM0=0xDA;//PCAģ�K0�Ĺ���ģʽ�Ĵ���
//---------------------------------------
//7 6
5 4
3
2 1
0
//- ECMn CAPPn CAPNn MATn T0Gn PWMn
ECCFn
//----------------------------------------
//ECOMn:ʹ�ܱ��^����1�r(sh��)ʹ�ܱ��^������
//CAPPn�������@���1�r(sh��)ʹ�������ز��@
//CAPNn��ؓ(f��)���@��1�r(sh��)ʹ���½��ز��@
//MATn:ƥ��:1�r(sh��)������PCAӋ(j��)��(sh��)����ֵ�cģ�K�ı��^/���@�Ĵ�����ֵƥ�䌢��λCCON�Ĵ����Д���(bi��o)־λCCFn
//T0Gn:���D(zhu��n)��1�r(sh��)����������PCA���Vݔ��ģʽ���PCAӋ(j��)��(sh��)����ֵ�cģ�K�ı��^/���@�Ĵ�����ֵƥ�䌢��CEXn�_���D(zhu��n)
//PWMn:�}���{(di��o)��(ji��)ݔ��ģʽ������1�r(sh��)�����ʹ��CEXn�_����PWMݔ��
//EECFn:ʹ��CCFn�Д������ʹ�ܼĴ���CCON�еIJ��@/���^��(bi��o)־CCFn���Á�(l��i)�a(ch��n)���Д�
sfr
PCA_PWM0=0xF2;//PCAģ�K0,PWM�Ĵ���
//-----------------------------------
//
7 6 5 4
3 2 1
0
//PCA_PWMn:- - - - | - -
EPCnH EPCnL
//-----------------------------------
sfr
CCAP1L=0xEB;
sfr
CCAP1H=0xFB;
sfr
CCAPM1=0xDB;
sfr
PCA_PWM1=0xF3;//
sbit
CR=0xDE;//��?y��n)�ֻ���ܺ?�����IJ���λ��ַ����������Щ0xDE������������(l��i)�Л_ͻ����(sh��)�H�ϲ���(hu��)�����
sfr AUXR1=0xA2;//PWM���_�
����2λ�� �pDPTR�x�� AD�D(zhu��n)�Q�Y(ji��)����ŷ�ʽ�{(di��o)�� SPIλ���{(di��o)��
void
ini_T0(void)
{
TMOD=0x02;//T0��ʽ2
TH0=0xb2;
//12MH�r(sh��)
TL0=0xb2;
TR0=1;
}
//
//�l�ʞ�50HZ
���ڵ�1/50=0.02s,��0.02S�ֳ�256�֣�0.02/256=0.000078125S=0.078125ms
//0.078125��һ�ݵĕr(sh��)�g
һ��256��
//CCAP0L=223;CCAP0H=223;��2.5ms
//243�r(sh��)�s��1ms (0.9375)
//CCAP0L=249;CCAP0H=248;��0.5ms
//236�r(sh��)��1.5ms (1.484375)
//230��2ms (2.03125)
void
main(void)
{
ini_T0();
//��ʽ2�������0.078125ms��������ÿ���һ��CL��1
CMOD=0x04;//���r(sh��)��0���������r(sh��)�ݔ��
//CIDL - -
- CPS2 CPS1 CPS0 ECF
//--------------------------------
//CIDL:Ӌ(j��)��(sh��)��п��e���ƣ�0�r(sh��)���������eģʽ��PCAӋ(j��)��(sh��)���^�m(x��)������1�r(sh��)���eģʽPCAֹͣ����������
//----------------------------------------------
//CPS2
CPS1 CPS0: PCAӋ(j��)��(sh��)�}�_�x��
//000:ϵ�y(t��ng)�r(sh��)犣�F(xi��n)OSC/12
//001:ϵ�y(t��ng)�r(sh��)�����F(xi��n)OSC/2
//010:���r(sh��)��0���������Ɍ�(sh��)�F(xi��n)���{(di��o)�l��PWMݔ��
//011:ECI/P3.4�_���ⲿ�r(sh��)�ݔ��(�������FOSC/2)
//100:ϵ�y(t��ng)�r(sh��)�,FOSC
//101:ϵ�y(t��ng)�r(sh��)�/4,FOSC/4
//110:ϵ�y(t��ng)�r(sh��)�/6,FOSC/6
//111:ϵ�y(t��ng)�r(sh��)�/8,FOSC/8
//-----------------------------------------------
//ECF:PCAӋ(j��)��(sh��)����Д�ʹ��:1�r(sh��)��ʹ�ܼĴ���CCON CFλ���Д������0�r(sh��)��ֹԓ��������
CL=0x00;//���������f��Ӌ(j��)��(sh��)��16λ���r(sh��)����ֵ
CH=0x00;//CH0��00
���Y(ji��)��(g��u)�D������CLǰ�������h(yu��n)��0
//CCAP0L=223;//�b����^��ֵ
//CCAP0H=223;
PCA_PWM0=0x00;
//EPC0H=0,EPC0L=0
CCAPM0=0x42;//�O(sh��)��ECOM1=1,PWM1=1.
//CCAP1L=223;
//CCAP1H=223;
PCA_PWM1=0x00;//EPC1H=0,EPC1L=0
CCAPM1=0x42;//�O(sh��)��ECOM1=1,PWM1=1.
CR=1;//CR=1,����(d��ng)PCA���Ӌ(j��)��(sh��)�������
��151�(y��)���������к�CMOD��CIDLλ���P(gu��n)��������ֺ�IDLE���P(gu��n)������183�(y��)������
//AUXR1=0xc0;//PWM0��P1.3�ГQ��P4.2
//PWM1��P1.4�ГQ��P4.3
while(1)
{
//========================�ɶ�C(j��)ֹͣ��������λ�{(di��o)��(ji��)��
CCAP0L=236;//�b����^��ֵ
CCAP0H=236;
CCAP1L=230;//�b����^��ֵ
CCAP1H=230;
while(1);
}
}
������ô�{(di��o)��pwm�ĸ��ƽ��������CCAPXL��CCAPXH�Ϳ����������@�δ��a�����Ҍ�(xi��)�������������@�ǂ�(g��)����(xi��)��-
-�������@�δ��a����ô��(sh��)�F(xi��n)��������������עጺ�Ԕ��(x��)�������С��邃?c��)ڌW(xu��)�˹�����Ľ̳��Ժ�����Lԇ���鿴�ٷ����փ�(c��)�ɣ��W(xu��)��(x��)��Ƭ�C(j��)��������Ҫ�IJ�����W(xu��)��(hu��)�˶��ٶ��ٖ|��������Ҫ��߀��һ�N�ԌW(xu��)�������������փ�(c��)����W(xu��)�@��оƬ��ô�õ��������Dz��Ǵ���������������](m��i)�У��������y(c��)ԇ���Ұl(f��)�F(xi��n)��CCAPXH��CCAPXL��ֵÿ��׃1����PWM���ƽ��׃0.07ms���������ô��(w��n)�}��(l��i)�ˣ���ǰ�����ᵽ�^(gu��)������360���C(j��)�{(di��o)�ٵą^(q��)�g���ֻ��0.1ms(1.47-1.37=0.1��������@��(g��)0.07�������ǿ�����C(j��)��(sh��)�F(xi��n)���D(zhu��n)���D(zhu��n)�����Լ�ֹͣ����������Ǜ](m��i)�k���{(di��o)�����ѭ�EС܇����Ҫ����܇�Ӄɂ�(c��)��݆�Ӯa(ch��n)���D(zhu��n)�ٲ��(l��i)���Ʒ���ģ��](m��i)���{(di��o)����������͛](m��i)����(sh��)�F(xi��n)ѭ�E��������@��(g��)��(w��n)�}��ԭ����ʲô�������8λ��pwmģ�K��8λ��pwm���������������е�ע������@��һ��:
//�l�ʞ�50HZ
���ڵ�1/50=0.02s,��0.02S�ֳ�256�֣� 0.02/256=0.000078125S=0.078125ms
//0.078125��һ�ݵĕr(sh��)�g
һ��256��
������˰������ô�Dz���51��Ƭ�C(j��)���Ʋ���360���C(j��)�أ������������\(y��n)�C(j��)���˵��^(gu��)�������������һ�Εr(sh��)�g�������^(gu��)�ŗ������������K������Ұl(f��)�F(xi��n)��stc15ϵ�І�Ƭ�C(j��)���������˼������������ڲ�ԃоƬ�ĕr(sh��)�������15�@���Ƭ�C(j��)�Ǜ](m��i)��pwmģ�K�ģ����(l��i)��֪��������@��оƬ����16λ�Ķ��r(sh��)���������@�ӣ���(w��n)�}��ӭ�ж�������������ٷ��ṩ���փ�(c��)������������16λ���r(sh��)�����Ԅ�(d��ng)���bģʽ����(sh��)�F(xi��n)8~16λPWM��ʾ�������w�ij������@���ҾͲ��г���(l��i)�������15���փ�(c��)100�(y��)�����dȤ��С�������Լ�ȥ�����ɡ�
����������360���C(j��)�������f(shu��)���ˣ��䌍(sh��)180���C(j��)Ҳ�����Ƶ�������ֻ�Ǹ��ƽ�IJ�ͬ��������ͬ�ĽǶȣ�0.5ms��0������2.5��180�������������һ�ӵ������������@���f(shu��)�±��^���׳��F(xi��n)�Ć�(w��n)�}�ɡ�����������·�ϵ��O(sh��)Ӌ(j��)������C(j��)Ҫ���늉���6v-7.2v��������Ҳ�S��(hu��)�l(f��)�F(xi��n)5v�䌍(sh��)��C(j��)Ҳ���D(zhu��n)������ǣ���늉���(hu��)����(l��i)�ܶ�δ֪�Ć�(w��n)�}����������C(j��)�y�D(zhu��n)������(j��ng)��һ�Εr(sh��)�g������������C(j��)�y�D(zhu��n)�Ĺ�Ȧ��������Ԟ����ҳ���Ć�(w��n)�}������ʾ�����@ʾ�](m��i)��(w��n)�}������������Ԟ��Ƕ�C(j��)���ˡ���(sh��)�H�ϣ���늳صĆ�(w��n)�}���늳��õĕr(sh��)�g�L(zh��ng)�ˣ�늉����������C(j��)�y�D(zhu��n)���������늳��ҽ��hʹ�ú�ģsss늳أ��@��(g��)늳���11.2V�������ʹ�ý���ģ�K��������7.2v����o��C(j��)����������5v�o��Ƭ�C(j��)�͂�������늾����ˡ��������������C(j��)���Լ����·�Еr(sh��)���(hu��)��(du��)��Ƭ�C(j��)��Ӱ���������ü��Ϲ�����x����ֹ��C(j��)�·��(du��)��Ƭ�C(j��)�ĸɔ_������
������������(ji��n)���f(shu��)��ʹ�ö�C(j��)�(q��)��(d��ng)С܇��늙C(j��)���������ʲô��(y��u)��������������������·������������ڶ�C(j��)��(n��i)�����·������҂����C(j��)�����O(sh��)Ӌ(j��)�·�ĕr(sh��)������H��Ҫ�O(sh��)Ӌ(j��)����(y��ng)�O��PWM��̖(h��o)ݔ��Ľӿڣ��dz���(ji��n)����������ͨ�Ĝp��늙C(j��)���O(sh��)Ӌ(j��)�·�ĕr(sh��)������t��Ҫ���]���(q��)��(d��ng)оƬ���ͱ��^��(f��)�s��������Ԍ����ЬF(xi��n)�ɵ��(q��)��(d��ng)ģ�K���I��(l��i)Ҳ��ֱ������������ڿ��������������C(j��)��(du��)��PWM�ľ���Ҫ��Ҳ��������������ѽ�(j��ng)Փ���^(gu��)��������r(ji��)����������C(j��)�ăr(ji��)������ͨ�p��늙C(j��)�ĺܶ���������ǰ��F�ăr(ji��)��(l��i)�����τx�Ŀ���푑�(y��ng)�������o�����ƽ1.5ms��pwm����C(j��)��(hu��)���̄xס�Լ������Ą�(d��ng)���@һ�c(di��n)�ǜp��늙C(j��)�����������������Ե����Dz��ö�C(j��)߀��늙C(j��)���W(xu��)�܌W(xu��)���Լ����ð�������
һ������Ȼ��(xi��)��4000��-
-!���Կ��ԣ�����X(ju��)���@ƪ���²��e(cu��)�����(du��)���Ў�������Ҳ�gӭ�D(zhu��n)�d����Ո(q��ng)ע�����ij�̎�����ߣ��������ڴ�һ�����˺ܶ�M�����������K�ڙC(j��)���˅f(xi��)��(hu��)�ҵ������_�c(di��n)���������](m��i)��Ŀ�ČW(xu��)��(x��)51��Ƭ�C(j��)����������C(j��)��������������F(xi��n)������Ŀ��(bi��o)�����W(xu��)��(x��)linux�������W(xu��)��(x��)�_(k��i)�l(f��)����·���������@��(g��)�f(xi��)��(hu��)��߀�njW(xu��)���˺ܶ�Ė|���ġ�����F(xi��n)�����������䌍(sh��)����һ�N�ж����đB(t��i)���������؏�(f��)�����ÌW(xu��)�L(zh��ng)�W(xu��)���������飬�ܶ���(y��u)�㶼��һ�N�����������Ҳ�gӭ��λС�����뵽���]���f(xi��)����������뵽�҂��@��(g��)�������������������˺�Ƶ�ꇠI(y��ng)�Ё�(l��i)��-
-���������������@��(g��)���ąf(xi��)��(hu��)��������ģ��������(hu��)�W(xu��)��(x��)������W(xu��)�Ė|���}������nj�(du��)��C(j��)�Ŀ��������Ɇ�(w��n)���������·��u(p��ng)Փ��������ҿ�����(hu��)�M��؏�(f��)����
�ؑc�]늴�W(xu��)�C(j��)���˅f(xi��)��(hu��)
����: �o(w��)�X�ڿƼ� �r(sh��)�g: 2016-10-15 12:32
�������������Ԕ��(x��)
����: yeyuaihaozhe �r(sh��)�g: 2017-9-9 22:37
�x�x,�W(xu��)��(x��)��Y��
����: kayan �r(sh��)�g: 2018-6-14 19:06
���Ў���
����: billboy �r(sh��)�g: 2019-4-30 11:27
�Y��߀���e(cu��)Ŷ
����: NCSTTIGER �r(sh��)�g: 2021-3-19 19:38
���x��������������������ĥ��ô��80c52���ƶ�C(j��)�����������](m��i)��(w��n)�}����ԇ�˺Î��춼����������������@��(g��)��������é���D�_(k��i)
����: �y(c��)��ϵ�ǡ� �r(sh��)�g: 2021-5-8 21:39
�Ҽm��һ�������C(j��)���ǿ����{(di��o)�ٵ���������ǰ��ARDUINO���ƶ�C(j��)�����һ��һ�ȵ��D(zhu��n)��(d��ng)��ÿ��֮�g���ӕr(sh��)�_(d��)���˿����ٶȵ�Ŀ�ġ�ֻ���f(shu��)�@�ӵľ��̷�ʽ�D(zhu��n)�Q��51��Ƭ�C(j��)�������y�������������һ���е�������Զ�C(j��)�ǿ����{(di��o)�ٵ����
| �gӭ���R (http://www.torrancerestoration.com/bbs/) |
Powered by Discuz! X3.1 |