��(bi��o)�}: ����STM32��Ƭ�C(j��)�Ĵ�Ť������ͬ��늙C(j��)�(q��)��(d��ng)ϵ�y(t��ng) [��ӡ���]
����: 51��Сţ �r(sh��)�g: 2016-4-10 21:48
��(bi��o)�}: ����STM32��Ƭ�C(j��)�Ĵ�Ť������ͬ��늙C(j��)�(q��)��(d��ng)ϵ�y(t��ng)
����
��Ť������ͬ��늙C(j��)ֱ���(q��)��(d��ng)����ȥ���ˏ�(f��)�s�ęC(j��)е����(d��ng)�C(j��)��(g��u)���Ķ������˙C(j��)е�Y(ji��)��(g��u)������Ч�ʵ��������S�o(h��)�l�����������c�D(zhu��n)��(d��ng)�T����Ȳ��������������Ч�ʸߡ� ���(d��ng)�c��С��������ȸ������푑�(y��ng)�졢ʹ�þS�����һϵ��ͻ����(y��u)�c(di��n)[1]��������������S�������Ӽ��g(sh��)�������Ų������늙C(j��)�O(sh��)Ӌ(j��)�c���켼�g(sh��)�����м��g(sh��)���������Փ�ȵ� �l(f��)չ����Ť������ͬ��늙C(j��)�ڔ�(sh��)�ؙC(j��)�������Vɽ�C(j��)е���ۿڙC(j��)е�ȸ�����ϵ�y(t��ng)�еõ���Խ��Խ�V���đ�(y��ng)��[2 - 3]������
����늙C(j��)����ϵ�y(t��ng)�V�����Æ�Ƭ�C(j��)��DSP�������FPGA�����ϵ�y(t��ng)�����������STM32 ��һ�N����ARM ��˾Cortex-M3 ��(n��i)�˵�����32 λ�W��������������������˸�����������ߴ��a�ܶȵ�Thumb-2 ָ��;o���Ƕ�������Д��������������S��������ӿ���������и�����������ͳɱ������ĵȃ�(y��u)�c(di��n)[4]������ᘌ�(du��)һ�N�ۿڙC(j��)е�ô�Ť������ͬ��늙C(j��)�(q��)��(d��ng)ϵ�y(t��ng)���� ����STM32 + IPM Ӳ����(g��u)���O(sh��)Ӌ(j��)�˸����ܡ��ͳɱ��Ŀ���ϵ�y(t��ng)�������
1 ��Ť������ͬ��늙C(j��)ʸ������ԭ��
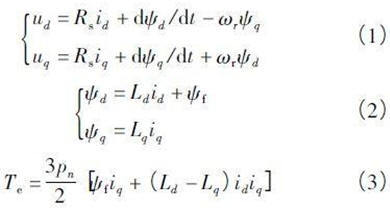
����늙C(j��)���F���������u�����Ŝ��p�ģ���Ӌ(j��)©��ͨ��Ӱ������Ť������ͬ��늙C(j��)��늉�������������D(zhu��n)�ط��̷քe��ʽ�У�
��d��������q��ud�������uq����id��iq���Ld��Lq�քe������ͬ��늙C(j��)d������q�S�Ĵ�朡�늉������������늸У�Rs��늘��@�M��������r���D(zhu��n)�ӽ��ٶȣ���f�������w�a(ch��n)�����c�D(zhu��n)�ӽ�朵Ĵ��������Te��늴��D(zhu��n)�أ�Pn��늙C(j��)�ŘO��(du��)��(sh��)�������
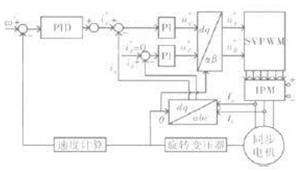
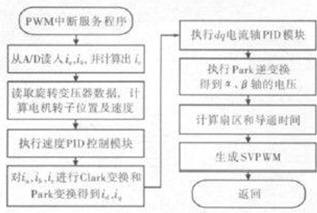
��ʽ(3)�������id=0ʹ�������ʸ��λ��q�S���˕r(sh��)�D(zhu��n)��Te��iq�ʾ����P(gu��n)ϵ�����(sh��)�F(xi��n)늴��D(zhu��n)�صĽ�����������D1��ʾ�����ĵ�����ͬ��늙C(j��)�����ٶȡ�����p�]�h(hu��n)��������D�Ц�*��o���ٶ�ָ��؞��ٶȷ�������������ٶ��`��ݔ���ٶȿ�����������ݔ�����S���ָ��i*q��ͨ�^���PI������������(bi��o)׃�Q���������SVPWM�a(ch��n)��IPM�_�P(gu��n)��̖(h��o)��
�D1 ��Ť������ͬ��늙C(j��)����ԭ����D
2 ϵ�y(t��ng)�O(sh��)Ӌ(j��)
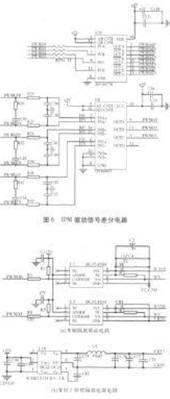
�D2 ��ʾ��ԓϵ�y(t��ng)�Y(ji��)��(g��u)��D���������IJ���STM32F103VCH6����оƬ��PM800HSA120���ܹ���ģ�K��ϵ�y(t��ng)����������Ӳ������ϵ�y(t��ng)��Ҫ��:̎����ģ�K;�z�y(c��)ģ�K����Ҫ������������z�y(c��)������D(zhu��n)׃�����ӿ��·;���·����Ҫ���������ܛ����(d��ng)���V�������Ƅ�(d��ng)�·���Լ�PM800HSA120�����(q��)��(d��ng)������o(h��)�������·�M��;�_�P(gu��n)�Դ������ģ�K�����Ҫ�ɶ�·DC/DC�D(zhu��n)�Q��ֱ��ĸ��늉����o(h��)��������ضșz�y(c��)���o(h��)���·�M���������
�D2��Ť������ͬ��늙C(j��)Ӳ��ϵ�y(t��ng)�Y(ji��)��(g��u)��D
2.1 Ӳ��ϵ�y(t��ng)�O(sh��)Ӌ(j��)
2.1.1̎����ģ�K
STM32F103VCH6�ǻ���ARM��˾Cortex-M3��(n��i)�˵�����32λ�W�������������������(j��)��ˮ���ͷ�֧�A(y��)�y(c��)���ܣ���߹����l�ʞ�72MHz���������ԝM�㱾ϵ�y(t��ng)̎���ٶȺ͌�(sh��)�r(sh��)�Ե������Ѓɂ�(g��)�����ܵ�12λ��16ͨ��A/D�D(zhu��n)�Q�������ɂ�(g��)16λ����늙C(j��)�(q��)��(d��ng)�O(sh��)Ӌ(j��)�ă�(n��i)Ƕ���^(q��)����6-PWM���r(sh��)��������Ƭ��߀������SPI��USB2.0���S�������O(sh��)�ͽӿ�[5]������D2��ʾ����ϵ�y(t��ng)���������STM32��Ƭ���YԴ��������������������̎������������λ�õȷ�����̖(h��o)�������������̎�����N���e(cu��)���o(h��)��̖(h��o)����(zh��)��늙C(j��)�����㷨��������
2.1.2�z�y(c��)ģ�K
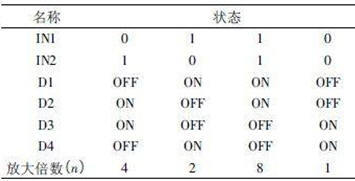
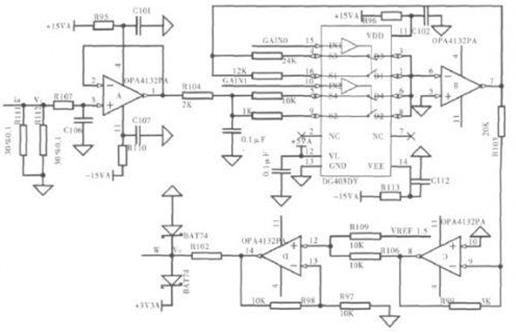
�z�y(c��)ģ�K��Ҫ��������z�y(c��)�·��λ�Ùz�y(c��)�·����������z�y(c��)�����Rķ����ͻ���������LT308-S7����������п��ɔ_������(qi��ng)���`���ȸ����������ԶȺ������ƯС�ȃ�(y��u)�c(di��n)�������˜pС������^���r(sh��)�ęz�y(c��)�`�����������O(sh��)Ӌ(j��)����D3��ʾ��������{(di��o)������z�y(c��)�·�����������ݔ���������̖(h��o)��(j��ng)�^�������ɘӺ��D(zhu��n)�Q��늉���̖(h��o)Vi��������(j��ng)�^늉����S�·����������(j��)�Ŵ��·��Ф�ػ����O���Qλ�·��ݔ��늉�Vo(Vo=3nVi/20+1.5�������n��Ŵ�(sh��))��STM32��A/Dģ�K�M(j��n)��̎�������������_�P(gu��n)оƬDG403��STM32���ƣ������{(di��o)������z�y(c��)�·�����������С����x������棬�������֮������ڴ�Ť��늙C(j��)�~��������_(d��)232A�����z�y(c��)�·���治���{(di��o)������t��(d��ng)����^���r(sh��)�z�y(c��)�·�ķŴ���������(du��)�^С������ęz�y(c��)���ȕ�(hu��)�������������������{(di��o)�ęz�y(c��)�·����������^���r(sh��)������棬�Ķ��pС�z�y(c��)�`�������������z�y(c��)�ķֱ��������
��1 ��DG403������̖(h��o)�c����z�y(c��)�·����Ŵ�(sh��)�Č�(du��)��(y��ng)�P(gu��n)ϵ�������
��1DG403������̖(h��o)�c����Ŵ�(sh��)��(du��)��(y��ng)��
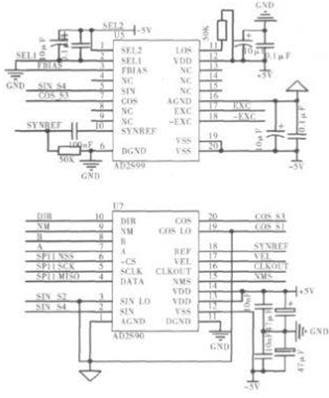
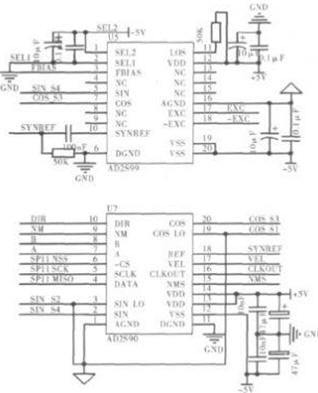
���]�ۿڙC(j��)е�����^��(qi��ng)���(d��ng)�͛_��[6]��������������D(zhu��n)׃����YS 210XFDW9574A�M(j��n)��λ�Ùz�y(c��)����������a�·��D4��ʾ���������AD2S99оƬ�����D(zhu��n)׃�����ṩ����(l��)��̖(h��o)������AD2S90оƬ�������D(zhu��n)׃����/��(sh��)���D(zhu��n)�Q��(RDC)��AD2S90��ͬ�����з�ʽ(SPI)�c����оƬSTM32֮�g�M(j��n)��ͨӍ�������AD2S99�Ą�(l��)����̖(h��o)Դ���l�ʿ���ͨ�^SEL1����SEL2�����FBIAS���_�M(j��n)���O(sh��)����������̎�����l���O(sh��)��10KHz������ͨ�^AD2S99��(n��i)��̎����a(ch��n)����ݔ����̖(h��o)SYNREF�cAD2S90��REF�_���B�������a(b��)�����D(zhu��n)׃����һ��(c��)������(c��)����λƫ���������C�����D(zhu��n)�Q�������
�D3 ����z�y(c��)�·
�D4 ���D(zhu��n)׃������a�·
�D5 ��ʾ�����D(zhu��n)׃��������(l��)�{(di��o)���·�����D(zhu��n)׃��������(l��)��̖(h��o)��AD2S99�ṩ����������(l��)�{(di��o)���·��(du��)����(l��)��̖(h��o)�M(j��n)�зŴ�������V��������(l��)�{(di��o)���·���ⲿ�Դ���á�15V�p�Դ������������C�·�o�B(t��i)�����c(di��n)�{(di��o)��;Ci1�������ݣ���ֱͨ��;Cf1���a(b��)����λ��;NPN��PNP���O�ܘ�(g��u)�������·�������������Խʧ�档
�D5 ���D(zhu��n)׃��������(l��)�{(di��o)���·
2.1.3���·
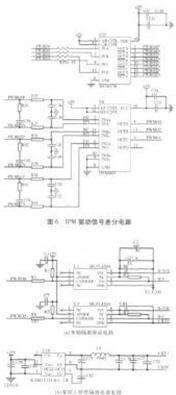
���·�������·������DD600N12����ģ�K;ܛ����(d��ng)�·����CM600HU-24F��̖(h��o)IGBT�����_�P(gu��n)ȡ���^��������ϵ�y(t��ng)�ɿ��������(d��ng)������M��늵�ĸ���~��늉���80%�r(sh��)������IGBT�����·;�V���·�x��16��(g��)6800��F늽����;�Ƅ�(d��ng)�·�x��CM400HU-24F��̖(h��o)IGBT�����_�P(gu��n)Ԫ����������������]��������������ĸɔ_��ɢ�ἰ��(j��ng)��(j��)�Ե������������x��6��(g��)��(d��)����Ԫ��IPMģ�KPM800HSA120����׃�·������PM800HSA120��(n��i)���������(q��)��(d��ng)�ͱ��o(h��)�·�������^���������Ƿ���͜ضȱ��o(h��)����������~�����800A������ƫ늉�1200V������������l�ʿ��_(d��)20kHz���������M(j��n)һ�����IPM�Ŀ��ɔ_�ԺͿɿ�������������Č�(du��)���(q��)��(d��ng)�·�ͱ��o(h��)�·�M(j��n)���˼ӏ�(qi��ng)�O(sh��)Ӌ(j��)��һЩ�~��̎����������D6��ʾ�������(du��)IPM���(q��)��(d��ng)��̖(h��o)�M(j��n)���˲��̎�����������оƬSTM32�l(f��)������·�(q��)��(d��ng)��̖(h��o)���ò���(q��)��(d��ng)оƬ׃?y��u)?2·��̖(h��o)������IPM�(q��)��(d��ng)�������ò�ֽ���оƬ߀ԭ��6·�(q��)��(d��ng)��̖(h��o)���Ȼ��(j��ng)�^���ٹ���ĸ��x�(q��)��(d��ng)���ͽoIPM����D7��ʾ��������ƹ�ģ�ɔ_��̖(h��o)������(qi��ng)��IPM�(q��)��(d��ng)��̖(h��o)�Ŀ��ɔ_���������D7(a)��ʾ��W��ĸ��x�(q��)��(d��ng)�·;�����Ϙ�۲��ø��x�Դ��늣����������һ·15V���������D7(b)��ʾ��W���Ϙ�۸��x�Դ�·����
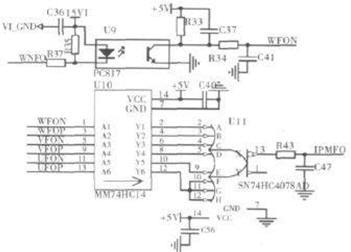
IPM �Ĺ�����̖(h��o)̎���·��D8��ʾ������e(cu��)��̖(h��o)�Ƚ�(j��ng)�^������x����V�����Ȼ��(j��ng)�^����ʩ�����|�l(f��)����һ���挢늉���̖(h��o)����������һ���挦(du��)���e(cu��)��̖(h��o)�M(j��n)�в���������������(du��)�ɔ_��̖(h��o)��һ�����������á�����ٌ�̎���^��IPM���e(cu��)��̖(h��o)ݔ�����оƬSTM32��������(y��ng)̎������
�D8 IPM���e(cu��)��̖(h��o)̎���·
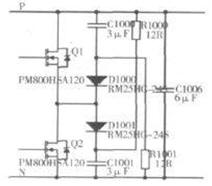
����IPM���_�P(gu��n)�l���^�ߣ����ڹ��ʻ�·�д��ڼ���늸������IPM�_�P(gu��n)�^���Е�(hu��)�a(ch��n)���ܸߵ���ӿ늉�����Ɍ�(du��)�����ě_�������Ӱ����������ܼ�ʹ�É�������������O(sh��)Ӌ(j��)����D9��ʾ��IPM���_�·�������Խ���IPM�_ͨ���P(gu��n)���^�̵�늉��������壬�Ķ����������_�P(gu��n)�p������������o(h��)������ȫ�\(y��n)�����������У��x��֏�(f��)���O��RM25HG-24S���龏�_���O������������͉�1200V����������֏�(f��)�r(sh��)�g300ns;�C�Ͽ��]��ϵ�y(t��ng)�(q��)��(d��ng)����l�ʼ�IPM��������������IPM�����l���x��8KHz����ȡֱ��ĸ������늸�50nH����������(j��)Ӌ(j��)�㼰ԇ�(y��n)����K�x�_���Cs=3��F������_���Rs=12����
�D9 IPM���_�·
2.2ϵ�y(t��ng)ܛ���O(sh��)Ӌ(j��)
ϵ�y(t��ng)ܛ����Ҫ����������Д����(w��)����(g��u)���������������������ɸ��NܛӲ���ij�ʼ������늙C(j��)��ʼλ�Ùz�y(c��)��늙C(j��)����(d��ng)��������Д����(w��)�������PWM�Д��ӳ�����ⲿ�Дౣ�o(h��)�ӳ���ȡ�����PWM�Д��ӳ����ǿ���ϵ�y(t��ng)�����������Ҫ��Ɍ�(du��)�D(zhu��n)��������ٶȵIJɼ��c̎������PID�{(di��o)��(ji��)������늉�ʸ����Ӌ(j��)���c�x��PWM�l(f��)�����������ⲿ�Д��ӳ�����Ҫ����ĸ��늉��^��Ƿ�����o(h��)���������(d��ng)���o(h��)�͜ضȱ��o(h��)��������(d��ng)IPM�г��e(cu��)��̖(h��o)�r(sh��)����STM32���Ƹ�(j��)���ƶ��r(sh��)����TIM1_BKIN��̖(h��o)��ֹPWMݔ������������Cϵ�y(t��ng)�İ�ȫ�����D10��PWM�Д����(w��)�������̈D���
�D10 PWM�����(w��)����
3 ��(sh��)�(y��n)�Y(ji��)��
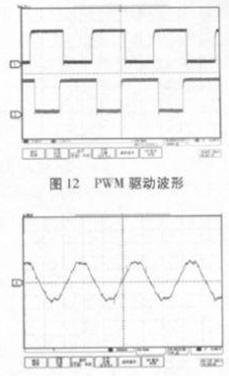
��D11��ʾ������鱾�����O(sh��)Ӌ(j��)����ͬ��늙C(j��)����ϵ�y(t��ng)��STM32���ư弰IPM�(q��)��(d��ng)�匍(sh��)�������(du��)һ�_(t��i)�~������132kW����~�����232A����ݔ��늉�380V�Ĵ�Ť������ͬ��늙C(j��)�M(j��n)���ˆ�Ԫ��ϵ�y(t��ng)��(sh��)�(y��n)�������D12��ʾ��W������۵�PWM���������y(c��)ԇPWM�l�ʞ�8KHz(����125��s);�D13��ʾ��늙C(j��)���d�\(y��n)�Еr(sh��)W�������������������������ϵ�y(t��ng)��ܛӲ��ģ�K������Ч�\(y��n)������
�D11�����·
4 �Y(ji��)�Z
���������һ�N����STM32�Ĵ�Ť������ͬ��늙C(j��)�Ŀ���ϵ�y(t��ng)����O(sh��)Ӌ(j��)��STM32̎����ģ�K��������{(di��o)������z�y(c��)�·����������D(zhu��n)׃�����ӿ��·������IPM�(q��)��(d��ng)���o(h��)�·�ȣ�����ʸ�����Ʒ�����������(sh��)�F(xi��n)������ͬ��늙C(j��)�ٶȺ��D(zhu��n)�ؿ��ƣ����M(j��n)����ԇ�(y��n)�(y��n)�C����������Ť������ͬ��늙C(j��)�(q��)��(d��ng)�����ṩ��һ�N��(w��n)���ɿ����������ԃr(ji��)�ȵķ�����
����: SnowWolf �r(sh��)�g: 2017-7-12 13:10
�x�x����������������
����: chinape �r(sh��)�g: 2020-5-5 12:06
�x�x����
| �gӭ���R (http://www.torrancerestoration.com/bbs/) |
Powered by Discuz! X3.1 |