標(biāo)題: 四軸飛行器—飛行原理 [打印本頁(yè)]
作者: 51hei不 時(shí)間: 2016-6-19 21:29
標(biāo)題: 四軸飛行器—飛行原理

1.結(jié)構(gòu)形式
直升機(jī)在巧妙使用總距控制和周期變距控制之前,四旋翼結(jié)構(gòu)被認(rèn)為是一種最簡(jiǎn)單和最直觀的穩(wěn)定控制形式。但由于這種形式必須同時(shí)協(xié)調(diào)控制四個(gè)旋翼的狀態(tài)參數(shù)���,這對(duì)駕駛員認(rèn)為操縱來(lái)說(shuō)是一件非常困難的事,所以該方案始終沒(méi)有真正在大型直升機(jī)設(shè)計(jì)中被采用。這里四旋翼飛行器重新考慮采用這種結(jié)構(gòu)形式���,主要是因?yàn)榭偩嗫刂坪椭芷谧兙嗫刂齐m然設(shè)計(jì)精巧,控制靈活���,但其復(fù)雜的機(jī)械結(jié)構(gòu)卻使它無(wú)法再小型四旋翼飛行器設(shè)計(jì)中應(yīng)用��。另外�,四旋翼飛行器的旋翼效率相對(duì)很低�����,從單個(gè)旋翼上增加拉力的空間是非常有限的���,所以采用多旋翼結(jié)構(gòu)形式無(wú)疑是一種提高四旋翼飛行器負(fù)載能力的最有效手段之一。至于四旋翼結(jié)構(gòu)存在控制量較多的問(wèn)題��,則有望通過(guò)設(shè)計(jì)自動(dòng)飛行控制系統(tǒng)來(lái)解決�。四旋翼飛行器采用四個(gè)旋翼作為飛行的直接動(dòng)力源����,旋翼對(duì)稱分布在機(jī)體的前后���、左右四個(gè)方向�,四個(gè)旋翼處于同一高度平面���,且四個(gè)旋翼的結(jié)構(gòu)和半徑都相同����,旋翼1和旋翼3逆時(shí)針旋轉(zhuǎn)����,旋翼2和旋翼4順時(shí)針旋轉(zhuǎn),四個(gè)電機(jī)對(duì)稱的安裝在飛行器的支架端���,支架中間空間安放飛行控制計(jì)算機(jī)和外部設(shè)備�����。四旋翼飛行器的結(jié)構(gòu)形式如圖1.1所示��。
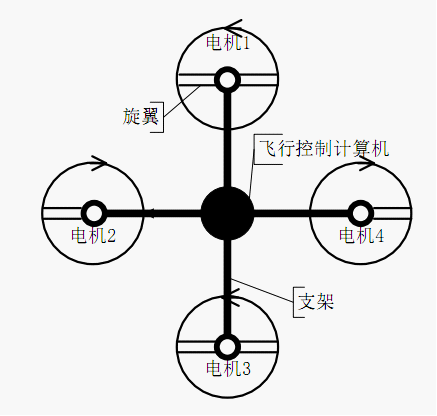
圖1.1四旋翼飛行器的結(jié)構(gòu)形式
2.工作原理典型的傳統(tǒng)直升機(jī)配備有一個(gè)主轉(zhuǎn)子和一個(gè)尾槳�����。他們是通過(guò)控制舵機(jī)來(lái)改變螺旋槳的槳距角����,從而控制直升機(jī)的姿態(tài)和位置。四旋翼飛行器與此不同�,是通過(guò)調(diào)節(jié)四個(gè)電機(jī)轉(zhuǎn)速來(lái)改變旋翼轉(zhuǎn)速,實(shí)現(xiàn)升力的變化�,從而控制飛行器的姿態(tài)和位置。由于飛行器是通過(guò)改變旋翼轉(zhuǎn)速實(shí)現(xiàn)升力變化����,這樣會(huì)導(dǎo)致其動(dòng)力部穩(wěn)定,所以需要一種能夠長(zhǎng)期保穩(wěn)定的控制方法����。四旋翼飛行器是一種六自由度的垂直升降機(jī),因此非常適合靜態(tài)和準(zhǔn)靜態(tài)條件下飛行����。但是四旋翼飛行器只有四個(gè)輸入力,同時(shí)卻有六個(gè)狀態(tài)輸出�,所以它又是一種欠驅(qū)動(dòng)系統(tǒng)。
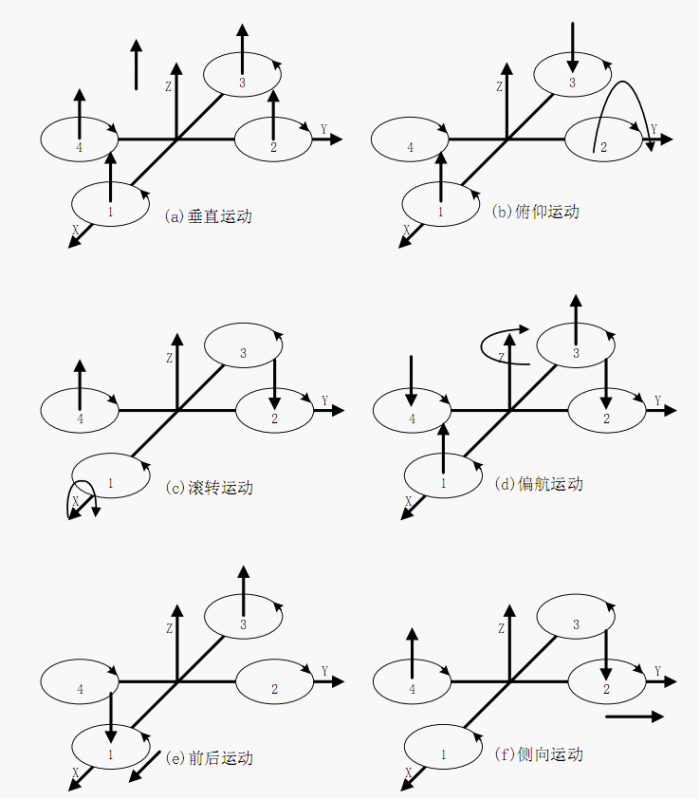
圖1.2四旋翼飛行器沿各自由度的運(yùn)動(dòng)
四旋翼飛行器結(jié)構(gòu)形式如圖所示����,電機(jī)1和電機(jī)3逆時(shí)針旋轉(zhuǎn)的同時(shí),電機(jī)2和電機(jī)4順時(shí)針旋轉(zhuǎn)����,因此當(dāng)飛行器平衡飛行時(shí),陀螺效應(yīng)和空氣動(dòng)力扭矩效應(yīng)均被抵消�。與傳統(tǒng)的直升機(jī)相比,四旋翼飛行器有下列優(yōu)勢(shì):各個(gè)旋翼對(duì)機(jī)身所施加的反扭矩與旋翼的旋轉(zhuǎn)方向相反��,因此當(dāng)電機(jī)1和電機(jī)3逆時(shí)針旋轉(zhuǎn)的同時(shí)�����,電機(jī)2和電機(jī)4順時(shí)針旋轉(zhuǎn)���,可以平衡旋翼對(duì)機(jī)身的反扭矩�。
四旋翼飛行器在空間共有6個(gè)自由度(分別沿3個(gè)坐標(biāo)軸作平移和旋轉(zhuǎn)動(dòng)作)�,這6個(gè)自由度的控制都可以通過(guò)調(diào)節(jié)不同電機(jī)的轉(zhuǎn)速來(lái)實(shí)現(xiàn)������;具\(yùn)動(dòng)狀態(tài)分別是:(1)垂直運(yùn)動(dòng)��;(2)俯仰運(yùn)動(dòng);(3)滾轉(zhuǎn)運(yùn)動(dòng)���;(4)偏航運(yùn)動(dòng)��;(5)前后運(yùn)動(dòng)���;(6)側(cè)向運(yùn)動(dòng)。在圖3.2中�����,電機(jī)1和電機(jī)3作逆時(shí)針旋轉(zhuǎn)���,電機(jī)2和電機(jī)4作順時(shí)針旋轉(zhuǎn)�,規(guī)定沿x軸正方向運(yùn)動(dòng)稱為向前運(yùn)動(dòng)��,箭頭在旋翼的運(yùn)動(dòng)平面上方表示此電機(jī)轉(zhuǎn)速提高�,在下方表示此電機(jī)轉(zhuǎn)速下降。
(1)垂直運(yùn)動(dòng):垂直運(yùn)動(dòng)相對(duì)來(lái)說(shuō)比較容易��。在圖中��,因有兩對(duì)電機(jī)轉(zhuǎn)向相反,可以平衡其對(duì)機(jī)身的反扭矩����,當(dāng)同時(shí)增加四個(gè)電機(jī)的輸出功率,旋翼轉(zhuǎn)速增加使得總的拉力增大�,當(dāng)總拉力足以克服整機(jī)的重量時(shí)��,四旋翼飛行器便離地垂直上升���;反之�����,同時(shí)減小四個(gè)電機(jī)的輸出功率�����,四旋翼飛行器則垂直下降���,直至平衡落地,實(shí)現(xiàn)了沿z軸的垂直運(yùn)動(dòng)���。當(dāng)外界擾動(dòng)量為零時(shí)����,在旋翼產(chǎn)生的升力等于飛行器的自重時(shí),飛行器便保持懸停狀態(tài)���。保證四個(gè)旋翼轉(zhuǎn)速同步增加或減小是垂直運(yùn)動(dòng)的關(guān)鍵���。
(2)俯仰運(yùn)動(dòng):在圖(b)中,電機(jī)1的轉(zhuǎn)速上升��,電機(jī)3的轉(zhuǎn)速下降���,電機(jī)2��、電機(jī)4的轉(zhuǎn)速保持不變����。為了不因?yàn)樾磙D(zhuǎn)速的改變引起四旋翼飛行器整體扭矩及總拉力改變�����,旋翼1與旋翼3轉(zhuǎn)速該變量的大小應(yīng)相等����。由于旋翼1的升力上升,旋翼3的升力下降,產(chǎn)生的不平衡力矩使機(jī)身繞y軸旋轉(zhuǎn)(方向如圖所示)��,同理��,當(dāng)電機(jī)1的轉(zhuǎn)速下降�,電機(jī)3的轉(zhuǎn)速上升,機(jī)身便繞y軸向另一個(gè)方向旋轉(zhuǎn)��,實(shí)現(xiàn)飛行器的俯仰運(yùn)動(dòng)���。
(3)滾轉(zhuǎn)運(yùn)動(dòng):與圖b的原理相同,在圖c中�����,改變電機(jī)2和電機(jī)4的轉(zhuǎn)速�,保持電機(jī)1和電機(jī)3的轉(zhuǎn)速不變,則可使機(jī)身繞x軸旋轉(zhuǎn)(正向和反向)�,實(shí)現(xiàn)飛行器的滾轉(zhuǎn)運(yùn)動(dòng)。
(4)偏航運(yùn)動(dòng):四旋翼飛行器偏航運(yùn)動(dòng)可以借助旋翼產(chǎn)生的反扭矩來(lái)實(shí)現(xiàn)�����。旋翼轉(zhuǎn)動(dòng)過(guò)程中由于空氣阻力作用會(huì)形成與轉(zhuǎn)動(dòng)方向相反的反扭矩�����,為了克服反扭矩影響,可使四個(gè)旋翼中的兩個(gè)正轉(zhuǎn)��,兩個(gè)反轉(zhuǎn)���,且對(duì)角線上的來(lái)年各個(gè)旋翼轉(zhuǎn)動(dòng)方向相同�����。反扭矩的大小與旋翼轉(zhuǎn)速有關(guān)���,當(dāng)四個(gè)電機(jī)轉(zhuǎn)速相同時(shí),四個(gè)旋翼產(chǎn)生的反扭矩相互平衡�,四旋翼飛行器不發(fā)生轉(zhuǎn)動(dòng);當(dāng)四個(gè)電機(jī)轉(zhuǎn)速不完全相同時(shí)�,不平衡的反扭矩會(huì)引起四旋翼飛行器轉(zhuǎn)動(dòng)。在圖d中�,當(dāng)電機(jī)1和電機(jī)3的轉(zhuǎn)速上升,電機(jī)2和電機(jī)4的轉(zhuǎn)速下降時(shí)�����,旋翼1和旋翼3對(duì)機(jī)身的反扭矩大于旋翼2和旋翼4對(duì)機(jī)身的反扭矩����,機(jī)身便在富余反扭矩的作用下繞z軸轉(zhuǎn)動(dòng)��,實(shí)現(xiàn)飛行器的偏航運(yùn)動(dòng)��,轉(zhuǎn)向與電機(jī)1�、電機(jī)3的轉(zhuǎn)向相反����。
(5)前后運(yùn)動(dòng):要想實(shí)現(xiàn)飛行器在水平面內(nèi)前后、左右的運(yùn)動(dòng)����,必須在水平面內(nèi)對(duì)飛行器施加一定的力�����。在圖e中�,增加電機(jī)3轉(zhuǎn)速,使拉力增大���,相應(yīng)減小電機(jī)1轉(zhuǎn)速����,使拉力減小,同時(shí)保持其它兩個(gè)電機(jī)轉(zhuǎn)速不變��,反扭矩仍然要保持平衡�����。按圖b的理論����,飛行器首先發(fā)生一定程度的傾斜,從而使旋翼拉力產(chǎn)生水平分量�,因此可以實(shí)現(xiàn)飛行器的前飛運(yùn)動(dòng)。向后飛行與向前飛行正好相反�。當(dāng)然在圖b圖c中,飛行器在產(chǎn)生俯仰�����、翻滾運(yùn)動(dòng)的同時(shí)也會(huì)產(chǎn)生沿x�����、y軸的水平運(yùn)動(dòng)�����。
(6)傾向運(yùn)動(dòng):在圖f中,由于結(jié)構(gòu)對(duì)稱���,所以傾向飛行的工作原理與前后運(yùn)動(dòng)完全一樣����。
作者: zxc5230 時(shí)間: 2016-6-25 10:20
說(shuō)的不錯(cuò)����,不過(guò)感覺(jué)還少點(diǎn)什么。如果附上公式推導(dǎo)的話感覺(jué)會(huì)更好理解些
作者: feishen 時(shí)間: 2016-6-30 11:29
謝謝分享
作者: fanmanu 時(shí)間: 2016-10-9 15:26
謝謝分享
作者: fanmanu 時(shí)間: 2016-10-9 15:27
謝謝分享����,作為參考資料不錯(cuò)
作者: 濤濤UU 時(shí)間: 2016-11-24 23:28
還是不太懂
作者: Ryan、行者 時(shí)間: 2017-3-14 21:21
謝謝分享
作者: Ryan���、行者 時(shí)間: 2017-3-14 21:21
正準(zhǔn)備做個(gè)四軸飛行器 ,感謝樓主
作者: muyangshaonian 時(shí)間: 2017-3-23 23:42
非常感謝樓主�����,想好好學(xué)學(xué)那個(gè)東西
作者: 往事如風(fēng)111 時(shí)間: 2017-5-3 12:22
不錯(cuò)�。
| 歡迎光臨 (http://www.torrancerestoration.com/bbs/) |
Powered by Discuz! X3.1 |