212906zwzhwvexn99xngjj.jpg (202.43 KB, 下載次數(shù): 123)
下載附件
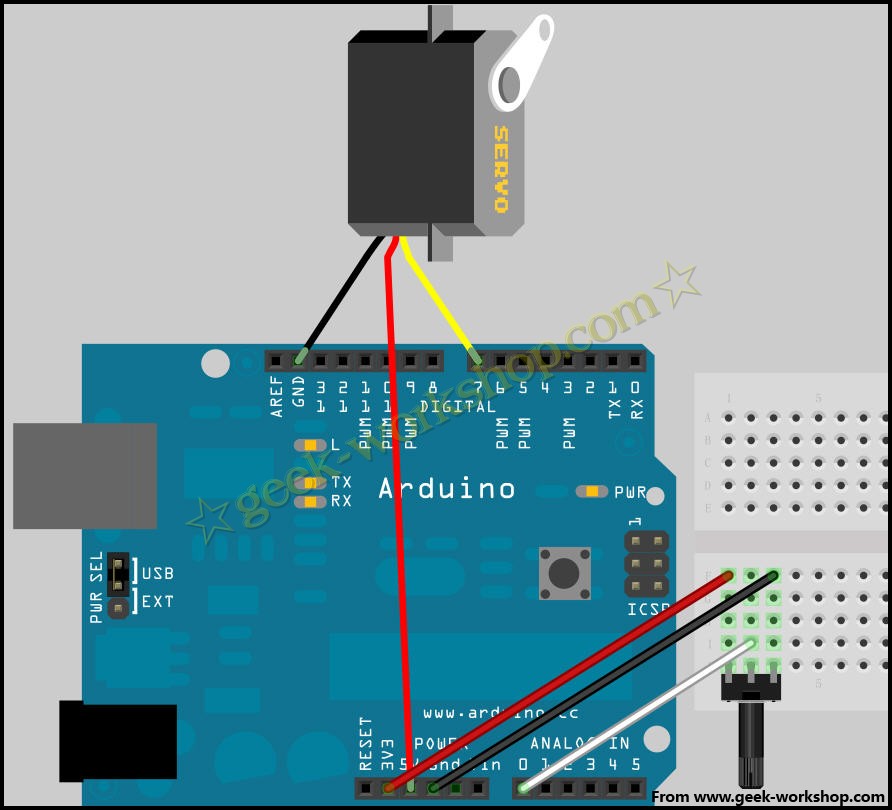
連接圖2
2017-2-14 21:31 上傳
212907mld560jz0djld6qf.jpg (93.96 KB, 下載次數(shù): 147)
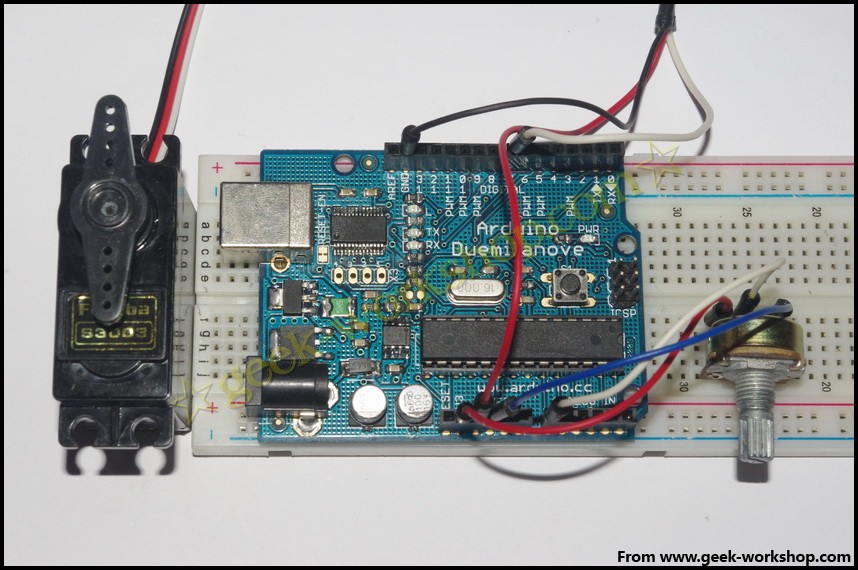
連接圖1