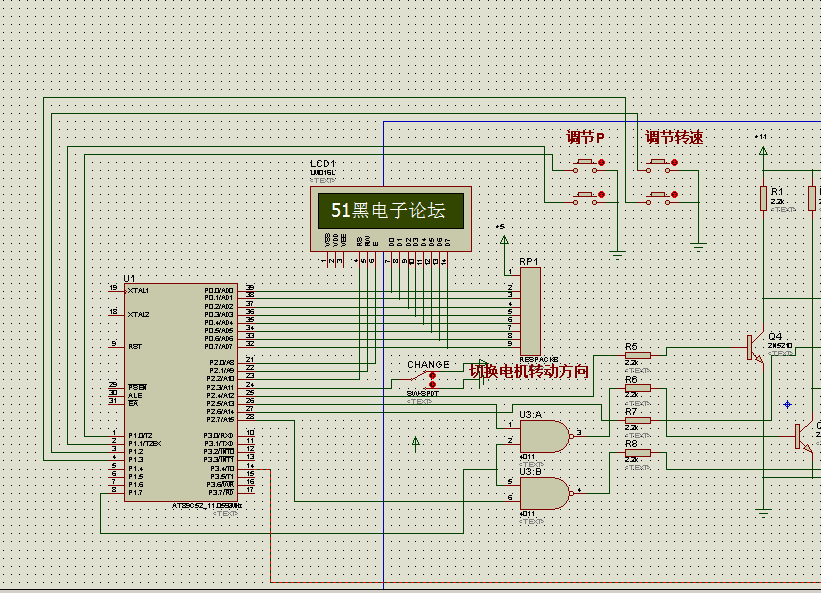
0.png (20 KB, 下載次數(shù): 183)
下載附件
2017-6-4 16:28 上傳
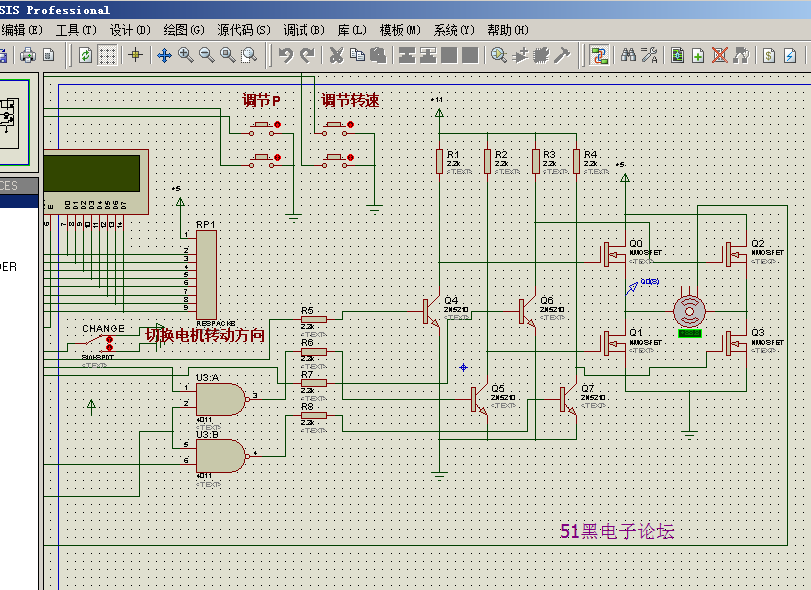
0.png (28.87 KB, 下載次數(shù): 147)
2017-6-4 16:27 上傳
0.png (71.1 KB, 下載次數(shù): 169)
 PID算法控制電機(jī)轉(zhuǎn)速.rar
(100.25 KB, 下載次數(shù): 1239)
PID算法控制電機(jī)轉(zhuǎn)速.rar
(100.25 KB, 下載次數(shù): 1239)




