介紹一個個人編寫的滑動濾波函數(shù):
#define OHG_BUF_IDX_MOV_STEP 1U
#define OHG_BUF_FLG_FULL 1U
#define OHG_BUF_FLG_NOT_FULL 0U
#define OHG_BUF_IDX_RESET 0U typedef struct _T_OHG_FILTER
{
INT16U u16_mFilterRult;
INT32U u32_mDataSum;
INT8U u8_mBufIndex;
INT8U u8_mBufFullFlg;
INT8U u8_mSampFactor;
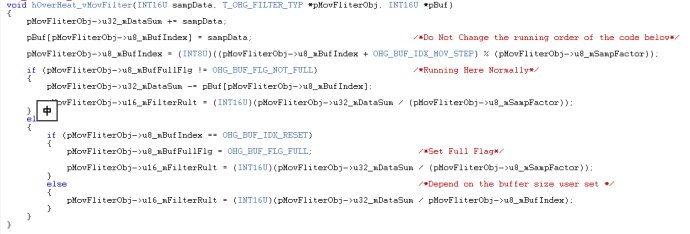
}T_OHG_FILTER_TYP; 函數(shù)原型: void hOverHeat_vMovFilter(INT16U sampData, T_OHG_FILTER_TYP *pMovFliterObj, INT16U *pBuf)
{
pMovFliterObj->u32_mDataSum += sampData;
pBuf[pMovFliterObj->u8_mBufIndex] = sampData; pMovFliterObj->u8_mBufIndex = (INT8U)((pMovFliterObj->u8_mBufIndex + OHG_BUF_IDX_MOV_STEP) % (pMovFliterObj->u8_mSampFactor));
if (pMovFliterObj->u8_mBufFullFlg != OHG_BUF_FLG_NOT_FULL)
{
pMovFliterObj->u32_mDataSum -= pBuf[pMovFliterObj->u8_mBufIndex];
pMovFliterObj->u16_mFilterRult = (INT16U)(pMovFliterObj->u32_mDataSum / (pMovFliterObj->u8_mSampFactor));
}
else
{
if (pMovFliterObj->u8_mBufIndex == OHG_BUF_IDX_RESET)
{
pMovFliterObj->u8_mBufFullFlg = OHG_BUF_FLG_FULL;
pMovFliterObj->u16_mFilterRult = (INT16U)(pMovFliterObj->u32_mDataSum / (pMovFliterObj->u8_mSampFactor));
}
else
{
pMovFliterObj->u16_mFilterRult = (INT16U)(pMovFliterObj->u32_mDataSum / pMovFliterObj->u8_mBufIndex);
}
}
} 用法: 1:定義對象和軟件緩沖區(qū): static T_OHG_FILTER_TYP STC_CurMovFilterObj; #define OHG_CUR_SAMP_FACTOR 10u
static INT16U hOverHeat_aCurFilterBuf[OHG_CUR_SAMP_FACTOR]; 2:初始化對象 for(i=0; i
{
hOverHeat_aCurFilterBuf = 0U;
}
STC_CurMovFilterObj.u16_mFilterRult = 0U;
STC_CurMovFilterObj.u32_mDataSum = 0U;
STC_CurMovFilterObj.u8_mBufIndex = OHG_BUF_IDX_RESET;
STC_CurMovFilterObj.u8_mBufFullFlg = OHG_BUF_FLG_NOT_FULL;
STC_CurMovFilterObj.u8_mSampFactor = OHG_CUR_SAMP_FACTOR; 3:周期調(diào)用濾波函數(shù): hOverHeat_vMovFilter(((INT16U)MotorActualCur), &STC_CurMovFilterObj, hOverHeat_aCurFilterBuf); 4:需要時讀取結(jié)果: hOverHeat_u16SysCurrent = STC_CurMovFilterObj.u16_mFilterRult;
| 









 QQ好友和群
QQ好友和群 QQ空間
QQ空間 騰訊微博
騰訊微博 騰訊朋友
騰訊朋友 收藏
收藏 淘帖
淘帖 頂
頂 踩
踩
