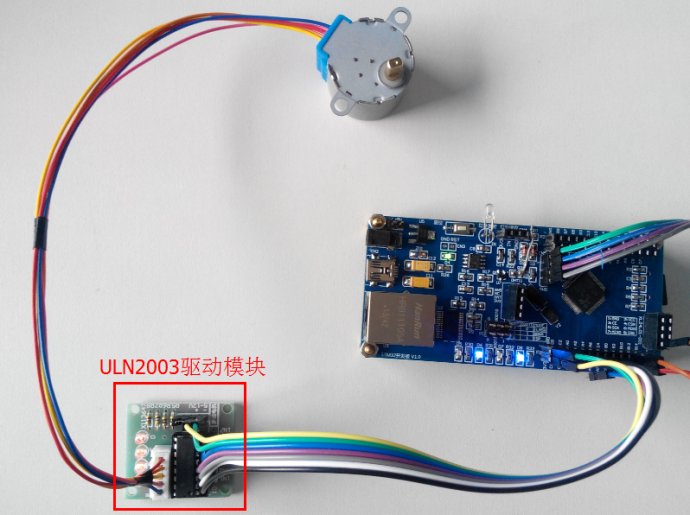
手上有一個步進電機和ULN2003電機驅動模塊,這是之前做Arduino實驗的時候留下的�,這幾天正好比較空閑,就移植了一個Arduino的Stepper庫���,這個庫是用于控制步進電機的����。這次我是將ULN的IN1-IN3接到Rainbow的PA1����、PA3、PA5���、PA7���,硬件情況如下圖:
 在軟件包的“Projects\Stepper_OneRevolution”文件夾包含了本文的完整工程,可以直接編譯���、燒寫和調試����。代碼非常簡單,貼出來了:
在軟件包的“Projects\Stepper_OneRevolution”文件夾包含了本文的完整工程,可以直接編譯���、燒寫和調試����。代碼非常簡單,貼出來了:
#include "WProgram.h"
#include "Stepper.h"
//根據(jù)馬達調整合適的分辨率
const int stepsPerRevolution = 200;
//5線4相步進電機�����,使用PA1, PA3, PA5, PA7
Stepper myStepper(stepsPerRevolution, PA1, PA3, PA5, PA7);
void setup()
{
//啟用默認串口�,波特率9600
Serial.start();
//設置馬達速度為60rpm
myStepper.setSpeed(60);
}
void loop()
{
// 發(fā)送順時針轉動指令
Serial.println("clockwise");
myStepper.step(stepsPerRevolution);
delay(500);
// 發(fā)送逆時針轉動指令
Serial.println("counterclockwise");
myStepper.step(-stepsPerRevolution);
delay(500);
}
int main(void)
{
//初始化開發(fā)板
boardInit();
setup();
while(1) loop();
}
程序編譯無誤后,下載到Rainbow中����,可以看到步進電機轉起來了��,和Arduino中運行效果完全一樣�。只是在這個應用中�,我發(fā)現(xiàn)步進電機時鐘只順時針轉動,不逆時針轉���,我跟蹤了一下程序,邏輯完全正確�,同時Arduino中運行起來也是這樣的,我對電機這塊沒有什么研究,但是程序邏輯方面沒有問題��,初步判斷可能是我這個步進電機的問題��,身邊沒有其它型號的步進電機��,所以無法最終確定問題所在�����。

